
1. Introduction
Nonlinear systems attracted much interest due to it's importance in explaining the dynamics of many systems in natures and science such as, gravitational waves, acoustics plasma waves, shallow water dynamics, no-linear optics, fluid dynamics and surface ocean waves [1], [2], [3], [4], [5], [6]. The microscopic systems that are governed by the principles of quantum physics is considered as a best example of q-deformed Sinh-Gordon equation [7], [8]. Many mathematical models describing some physical systems have been extensively studied by a group of researchers [9], [10], [11], [12], [13], [14], [15], [16], [17], [18], [19], [20], [21], [22], [23], [24].
Quantum calculus, often known as calculus without bounds, is the same as regular infinitesimal calculus but without the concept of bounds. It defines ” -calculus” and ” -calculus”, where ostensibly stands for Planck's constant while stands for quantum. The two parameters are related by the formula [25]
where are constantes and . For gives the standard Sinh-Gordon equation.
This paper has been organized as follows: The second section presents some definitions and properties of -calculus. In the third section, we present the methodology of the analytical method. In the fourth section, we present the solutions obtained. In the fifth section, we present the numerical solutions to the equation. In the sixth section, we present some different forms of solutions. In the seventh section, we present a conclusion of what we have done in the work.
2. q-Calculus
Now, we introduce some basic definitions of the -calculus as follows: [33]
● For any real number , let us define by
● In the -calculus, differential of function is defined as:
● The -gamma function is defined by
where Or, equivalently, and satisfies
● The -derivative of a function is given by
● The is defined by:
● The is defined by:
● We list below some simple and useful relations for -deformed functions
3. Mathematical analysis of the model
The following transformation is used to determine the traveling wave solution of (1.2),
where
where denotes the speed of traveling wave. Using (3.1) and (3.2), then (1.2) becomes,
Now, we take two cases for (3.3).
● Case one: Suppose
Then, (3.3) can be written as:
We can multiply both side of (3.4) by and after the integration we get
where is a constant of the integration.
Let
Thus, (3.5) becomes,
Thus, we can solve (3.7) using our method and from (3.6) and (3.1) we can get the solution of (1.2) in the first case.
● Case two: Suppose
Then, (3.3) can be written as:
After simplify (3.8) we get
Let
Thus, (3.10) becomes,
Thus, we can solve (3.11) using our method and from (3.10) and (3.1) we can get the solution of (1.2) in the second case.
4. The strategy of the extended tanh function method
Postulate the governing equation in the form
where: is a polynomial and its partial derivatives. Applying a traveling wave transformations to convert (3.1) to an ordinary differential equation:
The essential steps of the new generalization for the Extended function method are:
Step 1: The modified extended tanh method present the solution of (4.2) by the following finite series:
where , satisfy the Riccati equation
The solution of the Riccati Eq. (4.4) has the following cases of solutions: If then
If then
If then
Step 2: can be determined by balancing the highest order derivative term with the highest power nonlinear term in (4.2).
Step 3: Substituting (4.3) and (4.4) into (4.2) then gather all coefficients of the same powers of and put them equal to zero, we get a system of algebraic equations for , solving this equations we get all constants.
5. The analytical solution for the model
In this section, the generalization of kudryashov method applies to find the analytic solution to the two cases that were imposed for the Eq. (1.2)
● The analytical solution of case one at :
Applying the balance principle in (3.7) between and we get . From (4.3), the solution of (3.7) can be presented as:
Substituting (5.1) into (3.7), setting the coefficient of like power of equal to zero, we acquire the following system:
Solving the previous set of equations with the aid of Mathematica program, we obtain the following set of solutions.
● Class 1:
Substituting from (5.2) into (5.1) with (4.5), (4.6), (4.7), (3.6) and (3.1), we get the solutions of (1.2) at :
If , then
If , then
● Class 2:
Substituting from (5.7) into (5.1) with (4.5), (4.6), (4.7), (3.6) and (3.1), we get the solutions of (1.2) at :
If , then
If , then
● Class 3:
Substituting from (5.12) into (5.1) with (4.5), (4.6), (4.7), (3.6) and (3.1), we get the solutions of (1.2) at :
If , then
If , then
● The analytical solution of case two at :
Applying the balance principle in (3.11) between and we get . From (4.3), the solution of (3.7) can be presented as:
Substituting (5.17) into (3.11), setting the coefficient of like power of equal to zero, we acquire the following system:
Solving the previous set of equations with the aid of Mathematica program, we obtain the following set of solutions.
● Class 1:
Substituting from (5.18) into (5.17) with (4.5), (4.6), (4.7), (3.6) and (3.1), we get the solutions of (1.2) at :
If , then
If , then
● Class 2:
Substituting from (5.23) into (5.17) with (4.5), (4.6), (4.7), (3.6) and (3.1), we get the solutions of (1.2) at : If , then
If , then
● Class 3:
Substituting from (5.28) into (5.17) with (4.5), (4.6), (4.7), (3.6) and (3.1), we get the solutions of (1.2) at : If , then
If , then
6. The numerical solution for the model
In this section, we shall verify the results obtained in the last section using the cubic B-spline method. First, we approximate the variables of the space an time which are and with their derivatives as in [36], [37], [38], [39]. Next, assuming that the value of the function which is the exact solution of the model at the points on the grid and to be the same as the approximate solution at these points. The required values of and its first and the second derivatives, and , at nodal points are identified in terms of as
and if the time derivative is discretized using finite differences, we have where
Substituting (6.1) and (6.2) into (1.2) a we obtain the system of difference equations that can be solved to obtain the numerical results.
6.1. The numerical results
Now, we will introduce some numerical results for the generalized -deformed Sinh-Gordon equation by using the cubic b-spline method. As we studied the analytic solution for two special cases of the generalized -deformed Sinh-Gordon equation, we also present the numerical solution for these two cases they are as follows:
● The numerical results for case one:
In Table 1 and Fig. 5 we introduce comparison between the numerical results with the analytical solution (5.5) for (1.2) at .
Table 1 Comparison between the numerical results with the analytical solution. |
| Numerical solution | Analytical solution | Absolute error | |
|---|---|---|---|
| -10.0 | 2.21527 | 2.21527 | 7.62745 E-9 |
| -8.0 | 2.23127 | 2.23127 | 9.27982 E-9 |
| -6.0 | 2.31482 | 2.31482 | 2.74825 E-8 |
| -4.0 | 3.17330 | 3.17330 | 1.03583 E-8 |
| 4.0 | 2.53582 | 2.53582 | 6.64020 E-8 |
| 6.0 | 2.31482 | 2.31482 | 2.74823 E-8 |
| 8.0 | 2.23127 | 2.23127 | 9.28340 E-9 |
| 10.0 | 2.21527 | 2.21527 | 7.62753 E-9 |
Looking at the numerical results in the Table 1, which we obtained through the application of the cubic b-spline method, and comparing these results with the analytical solutions that we also obtained through the application of the extended tanh approach. We can see the extent to which the analytical results are in agreement with the numerical results. Which gives a clear indication of the two methods used in this work.
● The numerical results for case two:
In Table 2 and Fig. 6 we introduce comparison between the numerical results with the analytical solution (5.21) for (1.2) at .
Table 2 Comparison between the numerical results with the analytical solution. |
| Numerical solution | Analytical solution | Absolute error | |
|---|---|---|---|
| -10.0 | 0.919551 | 0.919551 | 1.11712 E-7 |
| -8.0 | 0.991031 | 0.991031 | 2.30162 E-7 |
| -6.0 | 1.059890 | 1.059890 | 6.37558 E-7 |
| -4.0 | 0.935264 | 0.935265 | 1.78687 E-6 |
| 4.0 | 0.602247 | 0.602247 | 1.06871 E-7 |
| 6.0 | 0.928088 | 0.928088 | 6.04087 E-7 |
| 8.0 | 0.982997 | 0.982997 | 2.46975 E-7 |
| 10.0 | 0.944264 | 0.944264 | 1.10615 E-7 |
From taking a look at the numerical findings in the Table 2, which were produced using the cubic b-spline method, and compare them to the analytical results found using the extended tanh approach. The degree to which the analytical and numerical results are in agreement can be shown.
Now, after what we presented of analytical solutions and numerical solutions to two special cases of the proposed equation, we present in the next section some figures through which we explain our good results.
7. Graphical illustrations
Herein, we present some figures in the two-dimensional, three-dimensional to clarify the solutions that we presented. Some of the analytical and numerical solutions are presented in Fig. 1, Fig. 2, Fig. 3, Fig. 4, Fig. 5, Fig. 6. In Fig. 1, we introduce the graph of (5.5) using our method at . Also, the graph of (5.6) , is presented in Fig. 2. Moreover, we present the graph of (5.20) at in Fig. 3. The graph of (5.21) , is presented in Fig. 4. Furthermore, in Fig. 5, we present comparison between the numerical results of (1.2) with the analytical solution (5.5) at . Finally, the comparison between the numerical results of (1.2) with the analytical solution (5.21) at , is presented in Fig. 5.
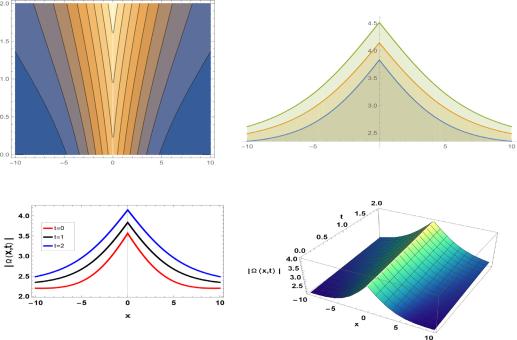
Fig.1 Graph of (5.5) at . |
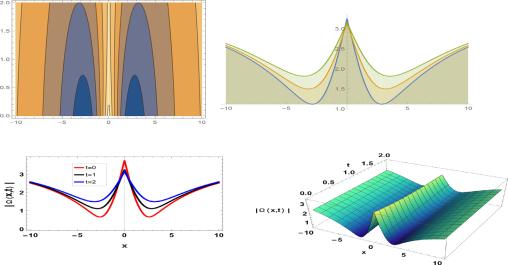
Fig.2 Graph of (5.6) at . |
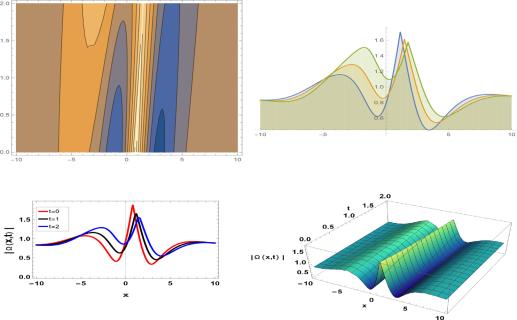
Fig.3 Graph of (5.20)using The new Kudryashov's method at . |

Fig.4 Graph of (5.21)using The new Kudryashov's method at . |
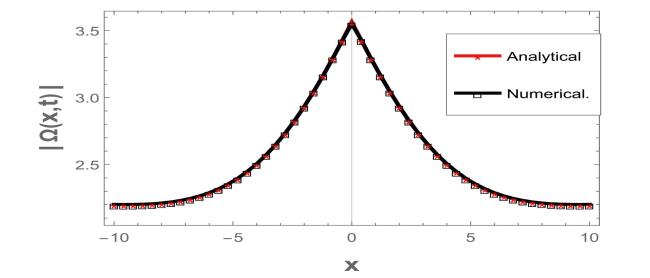
Fig.5 Comparison between the numerical results of (1.2) with the analytical solution (5.5) at . |
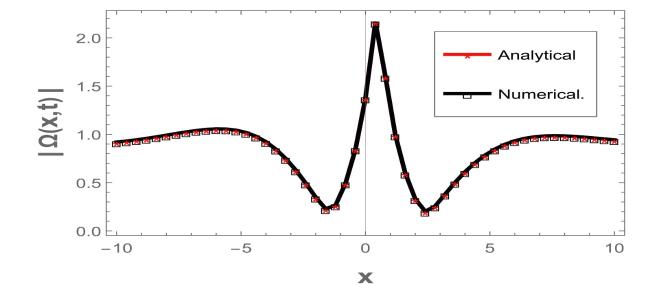
Fig.6 Comparison between the numerical results of (1.2) with the analytical solution (5.21) at . |
8. Conclusion
Finally, we presented an extended tanh approach method to study the generalized -deformed Sinh-Gordon equation. We have studied the model in this way and presented figures showing the correctness of what we hoped to reach from the proposed method. In addition, we presented an extensive numerical study of this model using the finite element method. In addition, the analytical solutions and the numerical solutions were compared. Through what we have reached, we can say that our results are a clear contribution to this field. At the end of our article, we present a future plan for our study, as we can solve more than one model in this way, and we can also develop other ways to solve different models. The proposed equation has opened up new possibilities for modeling physical systems in which symmetry has been compromised.
Declaration of Competing Interest
There is no conflict between the authors.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}