
1. Introduction
Many phenomena in science and engineering are expressed in the form of nonlinear evolution equations (NLEEs). In the last several decades, the study of nonlinear wave structures is becoming one of the dominant eras of contemporary research. In the presence of solitary waves, the nonlinear evolution models are utilized to simulate the effect of surface for deep water and weakly nonlinear dispersive long waves. Therefore, the exact solutions of such models play a vital role of study of dynamical structures and further properties of physical phenomenon occurring in numerous fields of study, such as electromagnetic theory, fluid motion, nuclear physics, optic fibres, physical chemistry, energy physics, compound physics and fluid mechanics [1], [2], [3], [4], [5], [6], [7], [8], [9], [10], [11], [12], [13].
In the soliton theory, the solitary wave interacts with one other without losing amplitude or velocity. Their identities and forms, for example, do not change as a result of their reciprocal interactions. Furthermore, the newly developed solutions and their graphical representations demonstrate various dynamical patterns of solitary waves, which is critical to develop a pre-eminent understanding about NLEEs emerging in diversified disciplines of science and engineering. In literature, a number of travelling wave solutions have been computed with the aid of the latest computing tools such as Mathematica, Maple or Matlab [14], [15], [16], [17], [18], [19], [20], [21].
There are several approaches for finding their exact solutions, including the extended simple equation method [22], the logistic equation method [23], the Kudryashov method [24], the direct perturbation method [25], the extended modified auxiliary equation mapping method [26], [27], the inverse scattering method [28], [29], the -model expansion method [30], [31], the expansion method [32], the tanh method [33], [34], the Hirota bilinear method [35], [36], [37], the exp-function method [38], [39], the generalized exponential rational function method [40], [41], the Darboux transformation [42], the Bäcklund transformation [43], [44], the residual power series method [45], the homogeneous balance method [46], [47], the modified extended direct algebraic method [48], the Lie group method [49], [50] and the variable separation method [51], [52].
The ( )-dimensional NLEE is a new integrable equation that can be used to explore shallow-water waves and short waves in nonlinear dispersive models. This model was initially used to explore the algebraic geometrical solutions [53] and with the help of the (1 + 1)-dimensional AKNS model, it can be reduced into a systems of solvable ordinary differential equations. In [54], the rogue waves and the rational solutions were obtained. An N-fold Darboux transformation was used to generate the complexiton solution, resonant solution and N-soliton solution [55]. The Hirota bilinear approach was used to create the N-soliton solution and its Wronskian form [56], [57]. The collision of first-order lump and line solitons to the considered model are constructed in Chen et al. [58], Tang et al. [59]. The multiple soliton solutions and a variety of traveling wave solutions of the equation are produced in Wazwaz [60], 61], 62]. The exact solutions, Bäcklund transformation and Bilinear representation were acquired in Liu and Liu [63].
In this work, we study the following ( )-dimensional nonlinear evolution equation [63]
where represents integral operator of x and is defined as
In recent decades, many powerful approaches for completely integrable evolution equations have been developed and applied. Such NLEEs offer a wide range of applications in ocean engineering, which have been studied in various ways. There are a number of intriguing approaches for obtaining their exact solutions, such as Lie symmetry technique [64], two variable ( , )-expansion method [65], simplified Hirota's method [66], modified simple equation method [67], conservation laws [67], Riccati-Bernoulli sub-ODE method [68], and Bäcklund transformation [68], generalized exponential rational function method [69], generalized Kudryashov method [69], Lie group method [70] and exp-function method [71].
2. The bilinear form of (1)
The following transformation is used to produce the bilinear form of (1)
As a result, we obtain the bilinear form shown below
where the D-operator [72] is defined as
Therefore, we attain
clearly if F fulfils (1), then gives the solution of given model (1) directly.
3. The main results
In this part, various symbolic structures (mostly drawn from Ghanbari [73]) are used to construct the analytical solution of the equation.
3.1. Collision among lump wave and strip soliton
In this subsection, we consider the function as follows
where
here 's are the unknown constants. Throughout this paper, these definitions for , , and are still valid.
Inserting (5) into (4), we obtain a set of equations involving various parameters. After solving this system with the help of some computing tool like Mathematica, we acquire the following results:
Case 1:
where , , , , , are free parameters. So using these parameters, Eq. (5) becomes
Using (6) along with (3), we obtain the solution of (1).
Case 2:
where , , , , , , , , , are free parameters. Using all these obtained values along with (5) and then utilizing (3), we get the solution of (1).
Case 3:
where , , , , , , , , are free parameters. So using these parameters, Eq. (5) becomes
Using (7) along with (3), we acquire the solution of (1).
Case 4:
where , , , , , , , , are free parameters. So using these parameters, Eq. (5) becomes
Using (8) along with (3), we attain the solution of (1).
3.2. Collision between lump wave and double stripes soliton
In this part, we obtain the following function
Putting (9) into (4), we obtain a set of equations involving various parameters. After solving this system with the help of some computing tool like Mathematica, we get the following results:
Case 1:
where , , , , are free parameters. So using these parameters, Eq. (9) becomes
Using (10) along with (3), we acquire the solution of (1).
Case 2:
where , , , , , , , , , are free parameters. Using all these obtained values along with (9) and then utilizing (3), we attain the solution of (1).
Case 3:
where , , , , , , , , are free parameters. Using all these obtained values along with (9) and then utilizing (3), we obtain the solution of (1).
Case 4:
where , , , , are free parameters. So using these parameters, Eq. (9) becomes
Using (11) along with (3), we get the solution of (1).
3.3. Collision among lump and periodic waves
In this case, we attain the function as follows
Inserting (12) into (4), we obtain a set of equations involving various parameters. After solving this system with the help of some computing tool like Mathematica, we acquire the following results:
Case 1:
where , , , , are free parameters. So using these parameters, Eq. (12) becomes
Using (13) along with (3), we acquire the solution of (1).
3.4. Collision between lump wave and double stripes soliton
Finally, we obtain the general structure stated as
Inserting (14) into (4), we obtain a set of equations involving various parameters. After solving this system with the help of some computing tool like Mathematica, we attain the following results:
Case 1:
where , , , , , , , are free parameters.
Using all these obtained values along with (14) and then utilizing (3), we acquire the solution of (1).
4. Travelling-wave solutions for Eq. (1)
Now, we will obtain the exact traveling wave solutions for (1) using expansion technique. Firstly, substituting
in (1) and utilizing the boundary condition , we get
Next, we obtain the transformation stated as
here are constants and is the speed of the wave. We use the transformation (17) in (16) to get an ordinary differential equation as
Integrating it twice, we get
Using the considered method, we assume the solution of (19) as follows:
here are parameters, and
Group 1: ,
where C is an integration constant.
Group 2: ,
Group 3: , , ,
Group 4: , , ,
Group 5: , , ,
Balancing and in (19), we obtain . Therefore, Eq. (20) can be stated as follows
Putting (29) along with (21) into (19), we obtain an algebraic system of equations given as follows:
We obtain the following result by solving this system:
Therefore, using these parameters we attain the following solutions for the given model:
Group 1: ,
inserting (31) into (15), we attain the solution as
similarly
inserting (33) into (15), we get the solution as
where .
Group 2: ,
inserting (35) into (15), we obtain the solution as
similarly
inserting (37) into (15), we acquire the solution as
where .
Group 3: , , ,
inserting (39) into (15), we obtain the solution as
Group 4: , , ,
inserting (41) into (15), we acquire the solution as
Group 5: , , ,
inserting (43) into (15), we attain the solution as
5. Discussion and results
This section displays graphical illustrations of the ( )-dimensional NLEE. For the suitable values of the constants involved, multiple profiles of the resultant solutions have been shown. For a given set of values, a variety of bright, dark, periodic, and singular bell-shaped solitons are shown. Fig. 1 shows the behaviour of solution for the values of the constants , , , , , and it represents a bright soliton solution. Similarly, Figs. 2, 4, 6, 8, 9 and 12 also represent the bright soliton solutions for the appropriate values of the parameters involving. Fig. 3 represents the singular bell shaped solution for the values of constants , , , , , , , , . Also, the Figs. 11, 13 and 14 represent the singular bell shaped solutions for the appropriate values of the parameters involving. Singularities can exist anywhere, and they're surprisingly abundant in physicists' mathematics for understanding the universe. Fig. 5 represents the dark soliton solution for the values of the parameters , , , , , , , , . Figs. 7 and 10 illustrate the periodic solitary waves solutions for the various values of the parameters involved. To better understand the behaviour of solutions, 3D, contour and 2D graphs of attained solutions with various parameter values are shown.
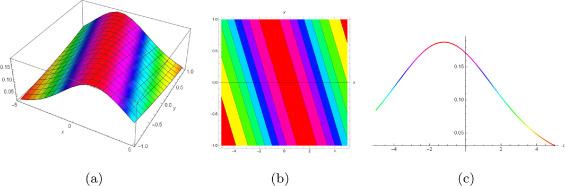
Fig.1 Profiles of the solution of (1) for , , , , , . |
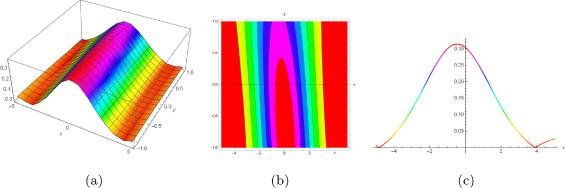
Fig.2 Profiles of the solution of (1) for , , , , , , , , , . |

Fig.3 Profiles of the solution of (1) for , , , , , , , , . |
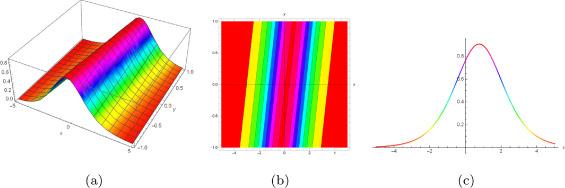
Fig.4 Profiles of the solution of (1) for , , , . |
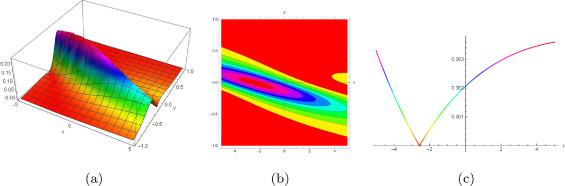
Fig.5 Profiles of the solution of (1) for , , , , , , , , . |
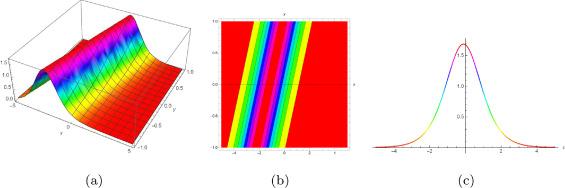
Fig.6 Profiles of the solution of (1) for , , , . |
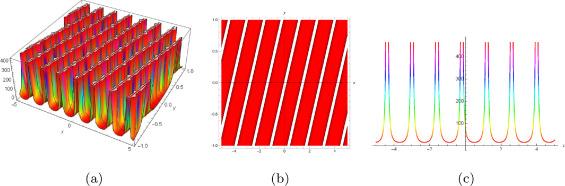
Fig.7 Profiles of the solution of (1) for , , , , . |
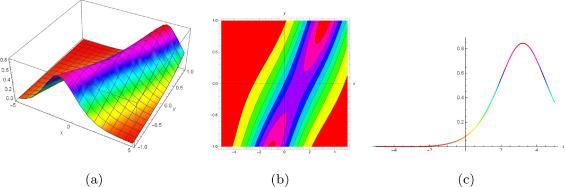
Fig.8 Profiles of the solution of (1) for , , , , , , , . |

Fig.9 Profiles of the solution of (1) for , , , , , . |
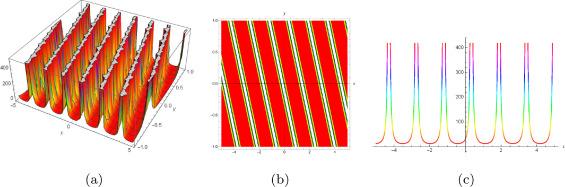
Fig.10 Profiles of the solution of (1) for , , , , , . |
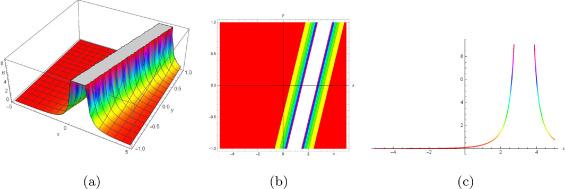
Fig.11 Profiles of the solution of (1) for , , , , , . |
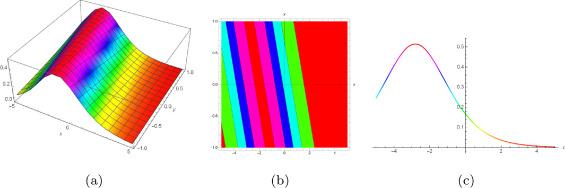
Fig.12 Profiles of the solution of (1) for , , , , , . |
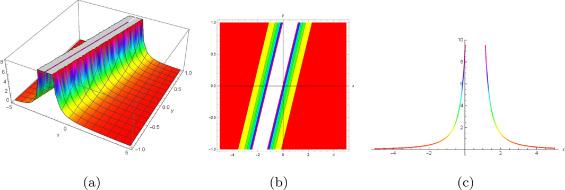
Fig.13 Profiles of the solution of (1) for , , , , , . |
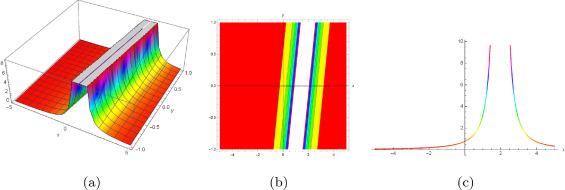
Fig.14 Profiles of the solution of (1) for , , , , , . |
6. Conclusion
In this paper, we use the Hirota bilinear approach and the expansion technique to investigate the ( )-dimensional NLEE. Using various sorts of functions, we were able to obtain a number of intriguing exact solutions to the given model. We were able to achieve alternative graphical interpretations of the given solutions for different sets of parameter values using Mathematica 11.0. Finally, we can say that the considered approaches can be used to explore a variety of NLEEs in mathematical physics.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}