
1. Introduction
The study of nonlinear partial differential equations (PDEs) has become inevitable in ages mainly because of their frequent use in the branch of nonlinear sciences having applications. In many research domains, including mathematics, fluid dynamics, plasma physics, ocean physics, and organism science, non-linearity is a fundamental component of nature whose manifestations represent real-life issues. The occurrence of nonlinear phenomena is contemplated as soliton inscription possibly. Solitons are unusual to punctuate their appearance in the form of dispersive media. In soliton phenomena, inconsistency and scattering are liable between altering components. One can enumerate soliton solutions of nonlinear PDEs by using different mathematical methods. These methods enable us to calculate the exact solutions of many distinct families of differential equations that emerge in various sectors of study. Among these methodologies, the modified Exp-function and Kudryshov methods [1], the modified Sardar sub-equation and q-homotopy analysis transform methods [2], extended direct algebraic method [3], the Bäcklund transformation method [4], generalized auxiliary equation method [5], the general projective Riccati equation method [6] and extended -expansion method [7] have recently been applied to analyze the solution of different types of nonlinear PDEs by various authors.
The Gardner equation is the pennant model for internal waves in squamous fluids. Also, it has applications in the field of plasma physics [8], [9], the dynamic of Bose-Einstein condensates [10], and nonlinear modulation of periodic waves [11]. The multi-dimensional Gardner-KP equation has a strong relationship with ocean engineering, as these indicate strongly nonlinear internal waves on ocean shelves in two-dimensional instances. In [12], weakly nonlinear, dispersive surface waves propagating near-critical depth levels were shown to be governed by the Gardner-KP equation. In [13], the propagation of dispersive shock waves was investigated by the cylindrical Gardner equation, which is obtained by employing a similarity reduction to the ( )-dimensional Gardner-KP equation. Subsequently, solitary wave solutions to the same equation were obtained by Tariq et al. [14]. In [15], authors computed the Jacobi elliptic function solutions and traveling wave solution of ( )-dimensional Gardner-KP equation. Using the Hirota bilinear method, Wazwaz [16], constructed solitons and singular solitons for the Gardner-KP equation.
The ( )-dimensional Gardner-KP equation can be formally derived as an extension of the ( )-dimensional Gardner-KP equation [17], which is the main topic of the current study. Hence, in this article, we obtain the exact and optical soliton solutions to the non-linear ( )-dimensional Gardner-KP equation:
where and is an real field that depicts the amplitude of the relevant waves, is the temporal component and are the spatial components.
The objective of this study is to analyze the solution of the governing model (1) by applying a hybrid method consisting of the Lie symmetry method and the new auxiliary equation method. The Lie symmetry analysis is utilized to find the vector field generated by infinitesimal symmetry operators and the corresponding optimal system of sub-algebras [19], [20], [24]. In the prospective approach, we build an optimal system of sub-algebras for Eq. (1) after calculating the group transformed solutions by using its Lie point symmetries. Each element of the optimal system helps us in trading Eq. (1) into ODEs. Where the exact solution to these ODEs is not achievable, we solve them by using the new auxiliary equation method [18] to get the optical soliton solution of the Gardner-KP equation. Recently, a variety of PDEs, including the breaking soliton equation [21], the Bogoyavlenskii-Kadomtsev-Petviashvili equation [22], the nonlinear transmission line equation [23], the dust acoustic solitary wave equation, the time-fractional Fisher equation [25], the generalized fractional Zakharov-Kuznetsov equations [26], the Burgers Huxley equation [27], the KdVmKdV equations [28], the modified Gardner equation [29], Symmetric regularized long wave equation [30] and the nonlinear wave equation [31] have been analyzed using this strategy. On the other hand, the new auxiliary equation method has also been ameliorated and applied to the different physical models to obtain their periodic wave solutions. Using this method, not only the traveling wave solutions to the problem are achievable, but also the solitary wave solutions and trigonometric function solutions are also achievable.
Finally, we declare that this model is not considered before for obtaining its optical soliton solutions via a hybrid method consisting of the Lie symmetry method and the new auxiliary equation approach. Moreover, the construction of an optimal system for the same model via the transformation matrix method is also new to the best of the authors' knowledge.
The following sections make up the structure of this publication. A derivation of Lie symmetries with corresponding Lie groups is presented in Section 2. In Section 3, we work out the one-dimensional optimal system of subalgebras along with an adjoint representation table. In the same Section, we compute some exact solutions to the considered model by successive reduction procedure. Finally, in Section 4, some traveling wave patterns are developed, and the results are portrayed graphically. The conclusion is drawn in the last section.
2. Lie symmetry analysis of Eq. (1)
In this part, we derive the infinitesimal generators and corresponding Lie algebra of the Gardner-KP Eq. (1). Let us assume the one-parameter Lie group of infinitesimal transformation in the following form:
where , , , , and are coefficients of infinitesimal transformations, while is a very small parameter. Vector field spanned by these infinitesimal generators for Eq. (1) is represented by
The fourth prolongation of can be defined as:
We obtain the Lie invariance condition by applying to Eq. (1):
which entail the surface invariant condition given as:
where and , , , , , are given as below:
and can be calculated from the following identity:
represent the partial derivatives with respect to , , , and . Using Eqs. (7) and (8) into Eq. (6) we get an over-determined system of PDEs. Solving this system for , , , , and we get:
where are arbitrary constants. From where, the symmetries of Eq. (1) are extracted in the following form:
We observe that obtained algebra found in Eq. (10) form a 8-dimensional Lie algebra. So the obtained algebra (10) can be represented as a linear combination of written as
2.1. Symmetry groups
Here we define the group transformation
which is spanned by the infinitesimal generators for Global form of the transformations can be obtained by solving the following initial value problems:
where
We obtain the following groups by manipulating different infinitesimal generators for
We see that the symmetry group represents the time translation, , , represent the space invariance and represent other symmetry groups.
If is a known solutions of Eq. (1), then by using above groups , then corresponding new solutions , can be obtained as follows:
We found the general solution of Eq. (1) by Maple software with different constants given below:
where , and are arbitrary constants. By choosing the inconsistent functions one can found many new solutions.
3. One-dimensional optimal system
Let us assume an -dimensional Lie algebra of a system of differential equations, where the vector fields is generated the Lie algebra . Two elements and in are known as identical pursuant under the adjoint action if they satisfy at least one of the following condition below [32]:
(1) Discover a transformation , that .
(2) There is with being any constant.
Here, the adjoint representation of is denoted by and . It enables the plausible exact invariant solutions in favor of the various symmetry sub-algebras. For getting such a system, it would be important to explore calculations of invariants and adjoint transformation matrix. The invariants and the adjoint matrix methods are utilized in our calculation. Firstly, we will present the general system of DEs step by step and then outline each step of our supposed nonlinear model.
3.1. Calculation of the invariants
If for all and all then on the Lie algebra is said to be an invariant where is an real function. Let us assume that two elements , and in , we have
where have achieved after essential calculation via commutator Table 1. Thus,
For any , it requires
Table 1 Commutator table . |
| 0 | 0 | 0 | 0 | 0 | ||||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 0 | 0 | 0 | 0 | 0 | ||||
| 0 | 0 | 0 | 0 | 0 | ||||
| 0 | 0 | |||||||
| 0 | 0 | 0 | 0 | |||||
| 0 | 0 | 0 | 0 | |||||
| 0 | 0 | 0 | 0 |
Accumulating all the coefficients of in Eq. (20), we obtain the following system of DEs:
From where, by computation, we get
3.2. Construction of the adjoint transformation matrix
In this segment, an adjoint transformation matrix analogous to five-dimensional Lie algebra is constructed. Lie algebra is used to establish the transformation matrix. Table 2 shows the adjoint representation of obtained vector field. Utilizing the adjoint action of to
we get
with
By the same procedure, we can construct the other matrices , , , , , and which are given below
Table 2 Adjoint representation table. |
Table 2 shows the adjoint representation of obtained vector field. We can find the adjoint matrix by using the matrices (24) and (25), which can be written as:
3.3. Optimal system
Following [32], the adjoint transformation equation for the Eq. (1) is
where Eq. (26) gives the adjoint matrix .
Suppose , and select a representative element . Putting , , and into Eq. (27), we obtain the following solution
That is to say, all the are equivalent to . In other words, all the inconsistent elements in Eq. (11) are identical to on the same lines, one can find the other cases for obtaining members of the optimal system. Finally, an optimal system of one-dimensional sub-algebras of the Eq. (1) is obtained to be those generated by single vector fields: , , , , , .
Linear combination of two vector fields: .
Linear combination of four-vector fields: .
We observe that in an optimal system, translational symmetries make an abelian algebra.
3.4. Similarity reductions and exact solutions
In this portion, we obtain the closed-form solutions and symmetry reduction by using a one-dimensional optimal system. Now, we interpret the following cases:
Case 1: For the vector field the associated Lagrange structure is given by
from which we get the similarity function and similarity variables of the form
computing Eq. (30) into Eq. (1), we obtain the reduced ( )-dimensional nonlinear PDE given by
Eq. (31) gives us the following explicit solution for Eq. (1)
re-substituting Eq. (32) into Eq. (30) and we get the solution for Eq. (1):
using the STM on Eq. (31), the new set of infinitesimals is obtained as:
where , are arbitrary constants.
Case 1(A): Let us take , and the other constant are zero. The function can be transformed as , with similarity variables and to obtain reduce (1+1)-dimensional nonlinear PDE given as
applying STM on Eq. (35), and we get the new set of infinitesimals:
where is constant parameter. Now, we reduce the Eq. (35) by using Eq. (36) to get the solution for Eq. (1): through back substitution, we obtained the solution for Eq. (1)
where are constants.
Case 2: For the vector field the characteristic equation is:
which give similarity function
using Eq. (39) into Eq. (1), we get the following PDE
Eq. (40) is the well known Laplace equation. Solution for Eq. (40) is given by:
through back substitution, we get following general solution for Eq. (1)
where , are constants.
Case 3: For the vector field the corresponding Lagrange form is given by
from which we get the similarity function and variables
using Eq. (44) into Eq. (1), we get the following reduced PDE:
Through Maple, we can easily calculate the solution for Eq. (45):
substituting Eq. (46) into Eq. (44) and we get explicit solution for Eq. (1) is:
where are arbitrary constants. using STM on Eq. (45), we get the new set of infinitesimals below
where , , , , are constants.
Case 3(a). We take , and , the function can be transformed with , and to reduce the Eq. (45) in the form of new invariant ODE
where , after integration, we get
through back replacement, we obtained closed-form solution
where are inconsistent values. Furthermore, we can take various cases of Eq. (48) to get more results.
Case 4: For the vector field the Lagrange form is given by
So, the similarity function and variables can be written as
computing Eq. (53) into Eq. (1), we obtain the reduced ( )-dimensional nonlinear PDE given by:
through Maple, we can simply find the solution of Eq. (54) of the form
substituting Eq. (55) into Eq. (53) and we get the explicit solution for Eq. (1) as:
where are arbitrary constants.
Case 5. For the vector field the Lagrange structure is given by:
which gives similarity function as
putting Eq. (58) into Eq. (1), we get following nonlinear PDE given by
using STM Eq. (59), we get the new set of infinitesimals,
The function can be transformed as , with similarity variables which reduces th Eq. (59) to the following PDE:
Applying the symmetry reduction procedure once more on the Eq. (61), we get the following ODE:
solving Eq. (62) and get the following result:
Hence, We obtain the solution for Eq. (1) through back substitution
where are constants.
Case 6. For the vector field , the corresponding characteristic equation is:
which gives similarity variables as
using transformation (66) into Eq. (1), we get the following nonlinear reduced PDE:
using Maple software, we get the solution for Eq. (67) as:
putting Eq. (68) into Eq. (66), we obtain the closed form solution for Eq. (1):
where , and are constants.
Further, applying STM on Eq. (67) to get the set of following infinitesimals:
with the help of Eq. (70), we get the following similarity variables
using Eq. (71) into Eq. (67) and we obtain the reduce (1+1)-dimensional nonlinear PDE given as
again using STM on Eq. (72) and we get the following set of infinitesimals
where are constants.
Case 6(a). Let us take , and , the function can be transformed with to get nonlinear ODE in the form of new invariant
solving Eq. (74), we get the solution of the following form
we obtained closed form solution for Eq. (1), using back replacement
where are constants. Additionally, to address different solution by taking various cases of Eq. (70).
4. Soliton solutions
4.1. Similarity reduction from translational symmetries
Now we want to investigate the some soliton solutions by taking the combination of translational symmetries , , , and . Let us assume following transformation
substituting Eq. (77) into Eq. (1) to obtain the following ODE:
the next task is to calculate soliton solutions for Eq. (78).
4.2. Solutions of Eq. (78) by new auxiliary method
Now, we will work out soliton solutions of (78) by the new auxiliary equation method [33]. The index in Eq. (78) is calculated by comparing the highest-order nonlinear term and highest order linear term in Eq. (78), from where we get Hence the Eq. (1) has the following form
with satisfying the auxiliary equation:
After substituting Eqs. (79) and (80) into Eq. (78) and comparing the coefficients of we obtain a system of equations which on solving results in the following values of , , and :
in view of the Eqs. (77), (79), and (81), we get the following form of :
following the general pattern of the new auxiliary equation method, we get the following categories of the solutions depending upon the parameters that appeared in Eq. (82):
Category 1: When and ,
Category:2 When and ,
Category:3 When and and ,
Category: 4 When , and ,
Category: 5 When and ,
Category: 6 When and ,
Category: 7 When , and ,
Category: 8 When and ,
Category: 9 When ,
Category: 10 When , and ,
Category: 11 When , and ,
Category: 12 When ,
Category: 13 When ,
Category: 14 When ,
Category: 15 When ,
Category: 16 When , and ,
Category: 17 When ,
4.3. Graphical results
In this section, we will use graphics to interpret some solutions.
4.3.1. Graphic description
Here, we will interpret graphical behaviour by choosing the satisfactory values of involving arbitrary parameters, we have shown 2D and 3D graphical structure of Eq. (83) for , , , , , , and , in Fig. 1, Fig. 2, Fig. 3, Fig. 4. In Figs. 5 and 6, graphically behaviour of 3D and 2D presented for .
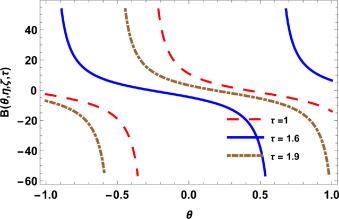
Fig.1 2D Graphics. |
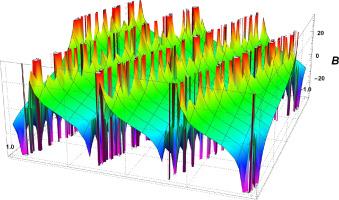
Fig.2 3D Graphics. Graphical interpretation of for , , , , , , and , . |
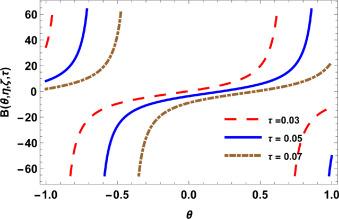
Fig.3 2D Graphics. |
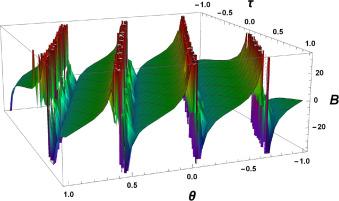
Fig.4 3D Graphics. Graphical interpretation of for , , , , , , , and . |
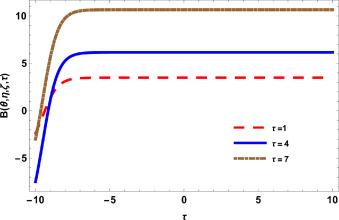
Fig.5 2D Graphics. |
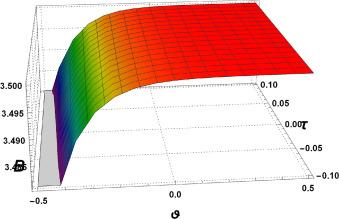
Fig.6 3D Graphics. Graphical interpretation of for , , , , , , , and . |
In Fig. 7, Fig. 8, Fig. 9, Fig. 10, graphically behaviour of 3D and 2D presented for Eq. (86) for , , , , , , , and . Graphically behaviour of 3D and 2D are presented for in Figs. 11 and 12.
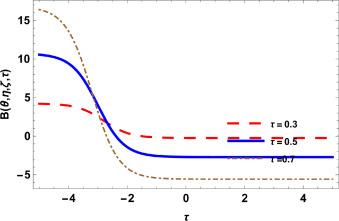
Fig.7 2D Graphics. |
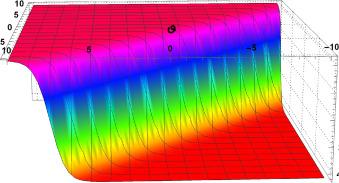
Fig.8 3D Graphics. Graphical interpretation of for , , , , , , , , and . |
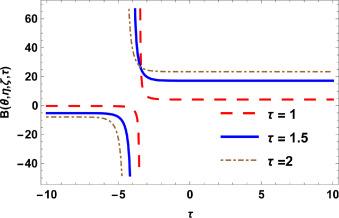
Fig.9 2D Graphics. |
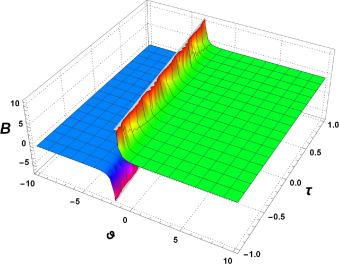
Fig.10 3D Graphics. Graphical interpretation of for , , , , , , , , and . |
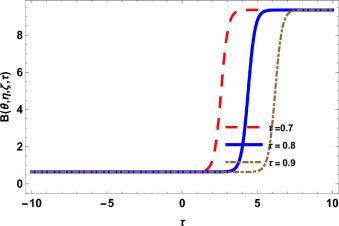
Fig.11 2D Graphics. |
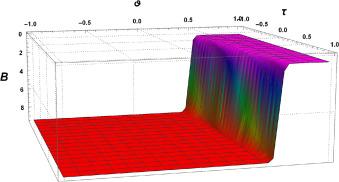
Fig.12 3D Graphics. Graphical interpretation of for , , , , , , , , and . |
Figs. 13 -16 shows the different graphically behaviours of Eq. (87) for , , , , , and , . We have showed the graphical representation of Eq. (88) for , , , , , , and in Fig. 17, Fig. 18, Fig. 19, Fig. 20. and also shows graphically structure for , , , , , , and , in Fig. 21 and 22.graphically behaviours of for , , , , , , and , in Fig. 23 and 24.

Fig.13 2D Graphics. |
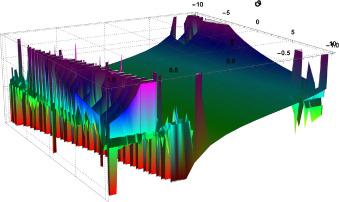
Fig.14 3D Graphics. Graphical interpretation of for , , , , , , , , and . |
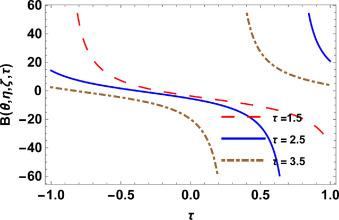
Fig.15 2D Graphics. |
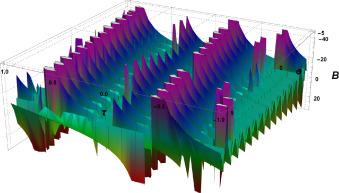
Fig.16 3D Graphics. Graphical interpretation of for , , , , , , , and . |
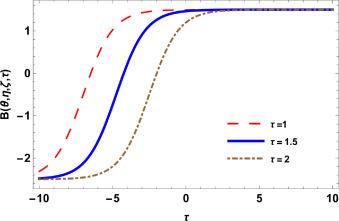
Fig.17 2D Graphics. |
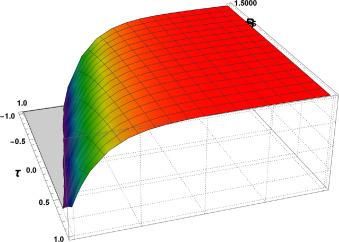
Fig.18 3D Graphics. Graphical interpretation of for , , , , , , , and . |
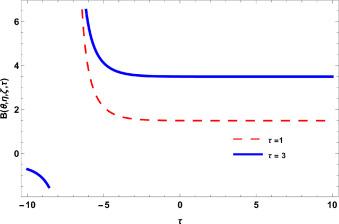
Fig.19 2D Graphics. |
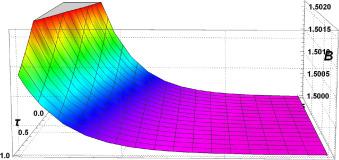
Fig.20 3D Graphics. Graphical interpretation of for , , , , , , , and . |

Fig.21 2D Graphics. |
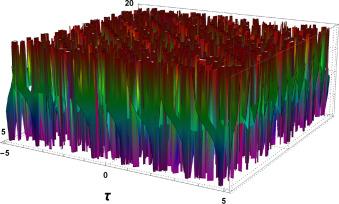
Fig.22 3D Graphics. Graphical interpretation of for , , , , , , , , and . |
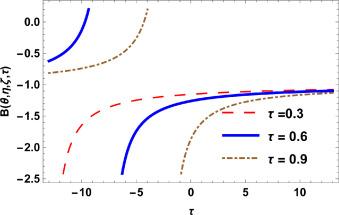
Fig.23 2D Graphics. |
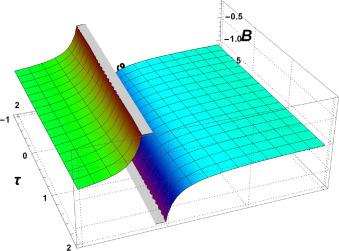
Fig.24 3D Graphics. Graphical interpretation of for , , , , , , , , , and . |
Figs. 25 and 26 shows the graphically behaviours of for , , , , , , and , . shows graphically representation for , , , , , , , , and in Fig. 27 and 28.
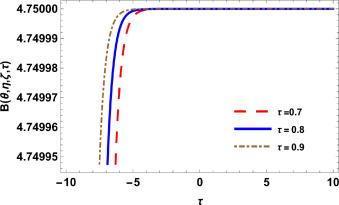
Fig.25 2D Graphics. |
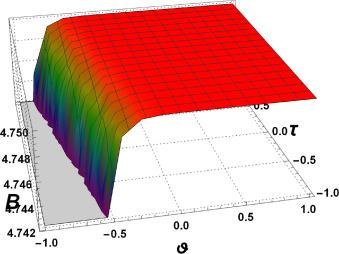
Fig.26 3D Graphics. Graphical interpretation of for , , , , , , , , and . |
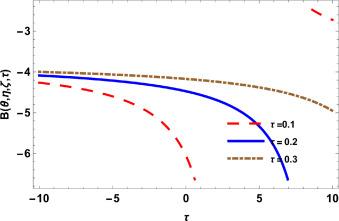
Fig.27 2D Graphics. |
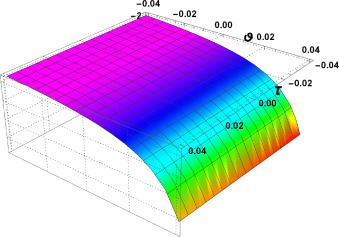
Fig.28 3D Graphics. Graphical interpretation of for , , , , , , , , and . |
5. Conclusion
Exact and solitons solutions to the ( )-dimensional Gardner-KP equation are analyzed using a hybrid method consisting of the Lie symmetry method and the new auxiliary equation method. These techniques are still encouraging for developing multiple periodic and soliton solutions to the model under consideration that have not been reported in the published literature. The application of the new auxiliary equation method can get a large number of distinct accurate solutions to the governing equation. The results of this study are significant to both physicists and mathematicians because the multi-dimensions Gardner-KP equation indicates strongly nonlinear internal waves on ocean shelves in two-dimensional instances. Also, weakly nonlinear, dispersive surface waves propagating near-critical depth levels were shown to be governed by the Gardner-KP equation. The new exact solutions to this equation having many applications in different fields will provide insight to mathematicians and physicists to study more nonlinear models.
Declaration of Competing Interest
Authors declare that they have no conflict of interest.
Acknowledgment
The authors would like to thank the Deanship of Scientific Research at Majmaah University for supporting this work under Project R-2022-178.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}