
1. Introduction
In the study of nonlinear physical phenomenon, the exploration of soliton wave solutions posses nonlinear evolution equations (NLEEs) is crucial. In the last several decades, this field had been researched. The study of nonlinear wave structures is becoming one of the dominant disciplines to describe nonlinear complex phenomena in diverse fields of nonlinear sciences, such as plasma physics, ocean physics, fluid dynamics, hydrodynamics, marine engineering, and many more [1], [2], [3], [4], [5], [6], [7], [8], [9].
Based on developments in computing tools, investigations of the exact solutions of those equations are currently rather spectacular. The Jacobi elliptic function expansion method [10], [11], the Exp-function method [12], the F-expansion method [13], the sub-ODE method [14], the parameter-expansion method [15], the lie symmetry analysis [11], the inverse scattering method [16], the variational iteration method [17], the tanh-method [18], the extended sinh-Gordon equation expansion method [19], the extended tanh-method [20], the homogeneous balance method [21], the extended truncated expansion approach, the Adomian decomposition method [22] and the homotopy perturbation method [23] are few approaches to understand the behaviour of various interesting nonlinear wave structures of recent era [24], [25], [26].
Some new travelling wave solutions have been computed including singular solitons, kink shaped and periodic solutions with the aid of the new computing tools such as Mathematica. In the Soliton theory, the solitary wave solutions interact with one other without losing amplitude or velocity. Their identities and forms, for example, do not change as a result of their reciprocal interactions. Furthermore, the newly developed solutions and their graphical representations demonstrate various dynamical patterns of solitary waves, which is critical to develop a pre-eminent understanding about NLEEs emerging in diverse disciplines of science and engineering [27], [28], [29], [30], [31], [32], [33], [34], [35], [36], [37].
Darvishi et al. introduced a well known model of ocean engineering namely the (3+1)-dimensional Boiti-Leon-Manna-Pempinelli (BLMP) model in 2012 [38], which describes the evolution of the horizontal velocity component of water waves propagating in the xy-plane in an infinite narrow channel of constant depth and can be considered as a model for incompressible fluid as an extension of the (2+1)-dimensional BLMP equation. X. Y. Gao studied the shock wave behaviour of this model by using the auto-Bäcklund transformation [39] while Li et al, employed the Bilinear method is used to develop some interesting forms of multiple-lump waves, namely, two-, four- and eight-lump waves, ump waves, breather waves, mixed waves, and multi-soliton wave solutions [40], later A. M. Wazwaz applied the simplified Hirota's method to deal the newly constructed models with constant coefficients and time-dependent coefficients. For obtaining multiple complicated soliton solutions, the author also employs the complex Hirota's criteria [41].
The aim of the study is to attain the exact solutions to the 3-dimensional BLMP model by employing the the -expansion approach and the Bernoulli sub-ODE approach and the modified Kudryashov method. The governing reads [42]
which describes the motion of antiphase boundaries in crystalline solids and has been widely used in various complicated travelling interface problems in materials science and fluid dynamics through a phase-field approach [43].
which describes the motion of antiphase boundaries in crystalline solids and has been widely used in various complicated travelling interface problems in materials science and fluid dynamics through a phase-field approach [43].
In this article, the produced closed-form solitary wave solutions are stated in terms of hyperbolic, trigonometric, and exponential rational functions with arbitrary constants.
2. Methodology
2.1. The Bernoulli sub-ode method
Consider the NLEE of the form:
where is the unknown function and is a polynomial.
where is the unknown function and is a polynomial.
Consider the transformation where where is constant speed of wave. After using this transformation the above NLPDE convert into the following nonlinear ODE
the solution of the Eq. (2) is of the form
where , are the constants to computed and is calculated by homogenous balance principle by comparing the highest order derivative and the highest degree of nonlinear term and provides the following second order ODE
where and are constants and
The required derivatives of Eq. (4) are determined and putting in Eq. (3) and collecting the coefficients of by setting of coefficients of polynomial to zero, an algebraic equation system is produced. These models are solved by Mathematica 11.0 program and substitute in Eq. (2) the solutions of Eq. (1) are obtained.
the solution of the Eq. (2) is of the form
where , are the constants to computed and is calculated by homogenous balance principle by comparing the highest order derivative and the highest degree of nonlinear term and provides the following second order ODE
where and are constants and
The required derivatives of Eq. (4) are determined and putting in Eq. (3) and collecting the coefficients of by setting of coefficients of polynomial to zero, an algebraic equation system is produced. These models are solved by Mathematica 11.0 program and substitute in Eq. (2) the solutions of Eq. (1) are obtained.
2.2. The -expansion method
Consider the NLPDE of the form:
where is the unknown function and is a polynomial.
where is the unknown function and is a polynomial.
Consider the transformation and for , where is constant speed of wave. After using this transformation the above NLPDE convert into the following nonlinear ODE
the solution of the Eq. (8) is of the form
where , are the constants to computed and is calculated by homogenous balance principle by comparing the highest order derivative and the highest degree of nonlinear term and provides the following second order ODE
where and are constants and
where A is an integral constant. The required derivatives of Eq. (9) are determined and putting in Eq. (8) and collecting the coefficients of by setting of coefficients of polynomial to zero, an algebraic equation system is produced. These models are solved by Mathematica 11.0 program and substitute in Eq. (7) the solutions of Eq. (1) are obtained.
the solution of the Eq. (8) is of the form
where , are the constants to computed and is calculated by homogenous balance principle by comparing the highest order derivative and the highest degree of nonlinear term and provides the following second order ODE
where and are constants and
where A is an integral constant. The required derivatives of Eq. (9) are determined and putting in Eq. (8) and collecting the coefficients of by setting of coefficients of polynomial to zero, an algebraic equation system is produced. These models are solved by Mathematica 11.0 program and substitute in Eq. (7) the solutions of Eq. (1) are obtained.
2.3. The modified Kudryashov method
Consider the NLPDE of the form:
where is the unknown function and is a polynomial.
where is the unknown function and is a polynomial.
Using the transformation
where varies according to given equation, this will carries the Eq. (12) to the nonlinear ODE of the form
is the polynomial in and the derivatives are ordinary with respect to .
where varies according to given equation, this will carries the Eq. (12) to the nonlinear ODE of the form
is the polynomial in and the derivatives are ordinary with respect to .
Suppose the solution of Eq. (13) is of the form
where the constants will be determine and positive integer is calculated by balancing principle.
where the constants will be determine and positive integer is calculated by balancing principle.
satisfies the ode
where , and .
where , and .
Susbtituting Eq. (14) in Eq. (13) and using mathematical teachnique we obtained a set of algebraic equations in parameters , and . Finally obtained new exact solutions for the Eq. (1) by arranging the extracted values in Eq. (13)
3. Mathematical analysis
Consider transformation
where Equation (1) reduces to
where Equation (1) reduces to
3.1. Applications to the Bernouli sub-ode method
By balancing principle we achieve . The solution of Eq. (1) of form
satisfies the above equation
putting Eq. (18) along with its first two derivative and collecting coefficient of , we obtained following system:
Family I.
satisfies the above equation
putting Eq. (18) along with its first two derivative and collecting coefficient of , we obtained following system:
Family I.
Case I.
Case II.
Family II.
Case I.
Case II.
Case III.
Family III.
Case II.
Case III.
Family III.
Case I.
3.2. Applications of -expansion method
By balancing principle we achieve . The solution of Eq. (1) of form
satisfies the above equation
putting Eq. (17) along with its first two derivative and collecting coefficient of , we obtained following system:
Family I.
satisfies the above equation
putting Eq. (17) along with its first two derivative and collecting coefficient of , we obtained following system:
Family I.
Case I.
Family II.
Family II.
Case I.
Case II.
Case III.
Family III.
Case II.
Case III.
Family III.
Case I.
Case II.
Case II.
3.3. Applications to the modified Kudrayshov method
By balancing principle we obtained . The solution for Eq. (18) of form
satisfies the above equation
Putting Eq. (20) along with its first two derivatives and collecting the coefficients of , we obtained the following system:
The following cases arise:
satisfies the above equation
Putting Eq. (20) along with its first two derivatives and collecting the coefficients of , we obtained the following system:
The following cases arise:
Case I.
Case II.
Case III.
Family II.
Case II.
Case III.
Family II.
Case I.
Case II.
Family III.
Case II.
Family III.
Case I.
4. Discussion and results
Graphical representations of several optical solitons and periodic wave structures are shown in this section. For a given set of values, a family of bright, dark, periodic, and single solitons are illustrated. The nature of nonlinear waves derived from Eq. (1) is visualised in 3D, 2D, and contour plots.
To demonstrate the solutions constructed by the Bernoulli sub-ODE method, Fig. 1 illustrates established in Case I for and ; Fig. 2 displays established in Case II for and . Similarly, Fig. 3 illustrates established in Case I for and ; while Fig. 4 demonstrates found in Case II for and ; while Fig. 5 demonstrates found in Case III for and and Fig. 6 gives observed in Case I for and .

Fig.1 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |

Fig.2 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |

Fig.3 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
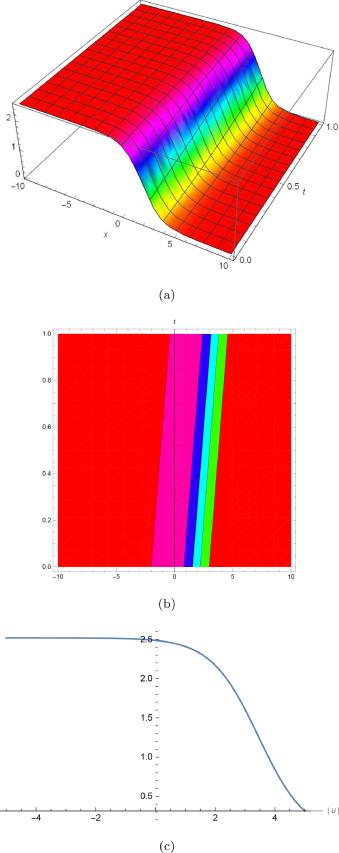
Fig.4 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
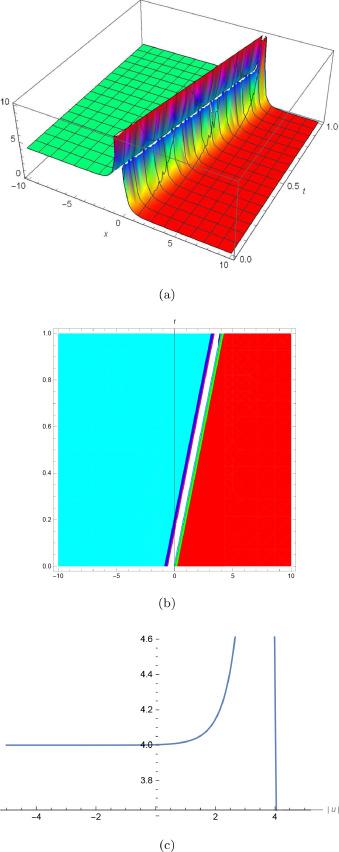
Fig.5 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
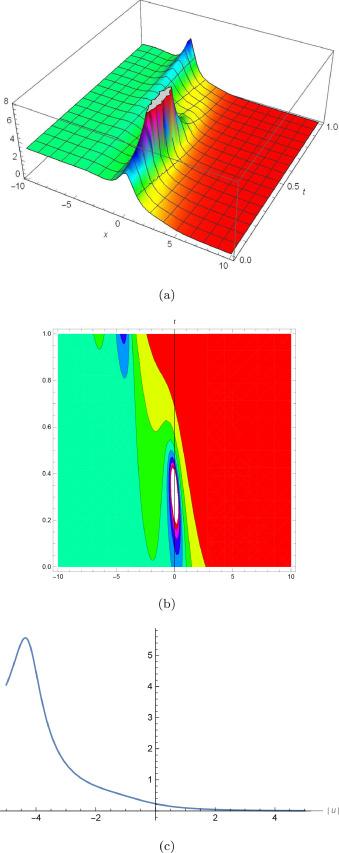
Fig.6 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
To express the solutions obtained by the -expansion method, Fig. 7 illustrates in Case I for and ; Fig. 8 expresses established in Case I for and ; Fig. 9 demonstrates found in Case II for and ; while Fig. 10 demonstrates found in Case III for and ; Fig. 11 represents found in Case I for and and Fig. 12 determines found in Case II for and .
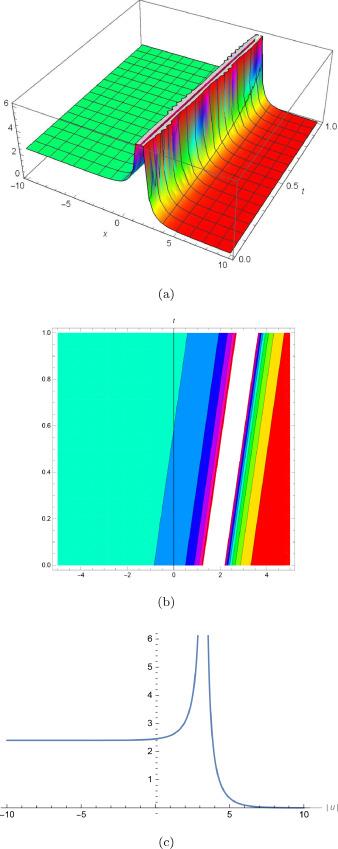
Fig.7 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
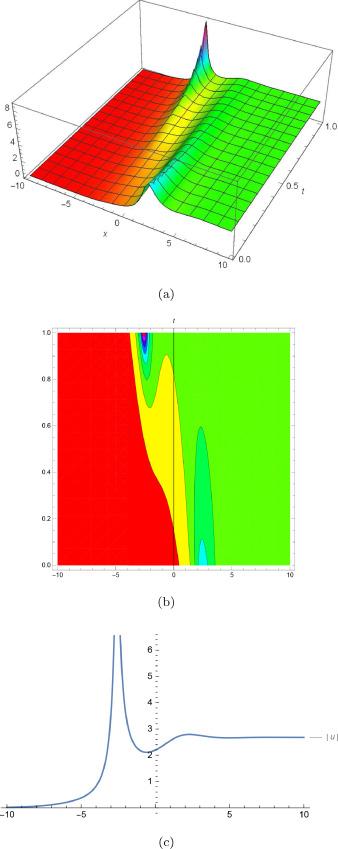
Fig.8 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |

Fig.9 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
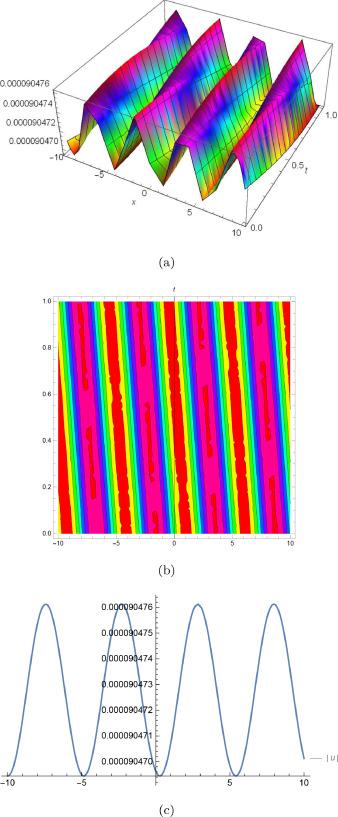
Fig.10 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
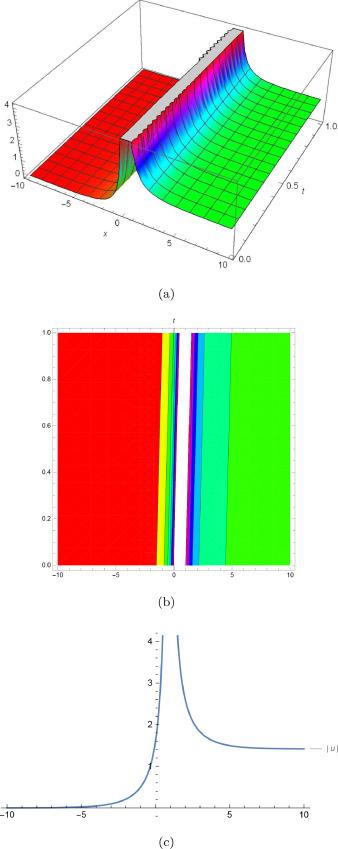
Fig.11 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
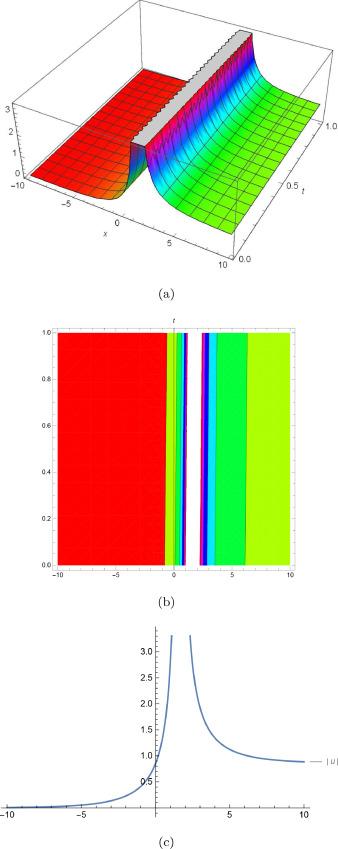
Fig.12 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
To demonstrate the solutions developed by the modified Kudrayshov method; Fig. 13 illustrates established in Case I for and while Fig. 14 demonstrates found in Case II for and ; Fig. 15 demonstrates found in Case III for and ; Fig. 16 illustrates established in Case I for and ; Fig. 17 illustrates established in Case II for and and Fig. 18 shows observed in Case I for and .
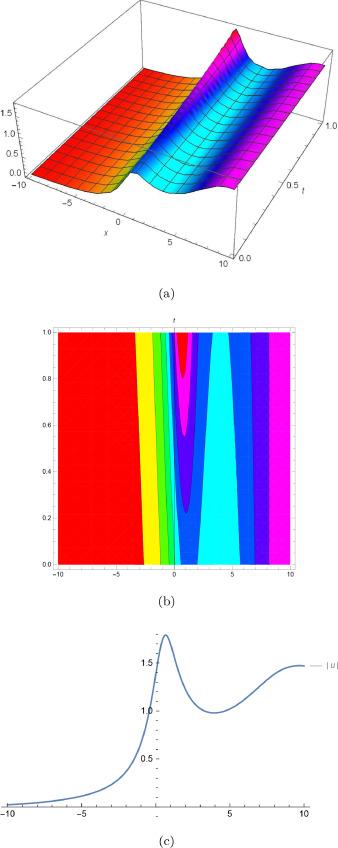
Fig.13 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |

Fig.14 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
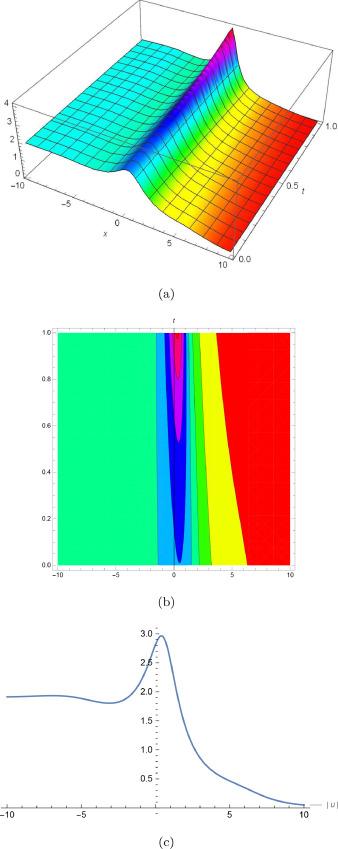
Fig.15 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
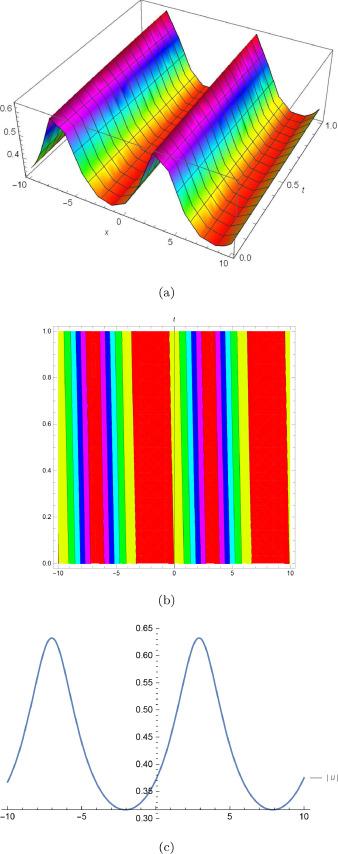
Fig.16 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
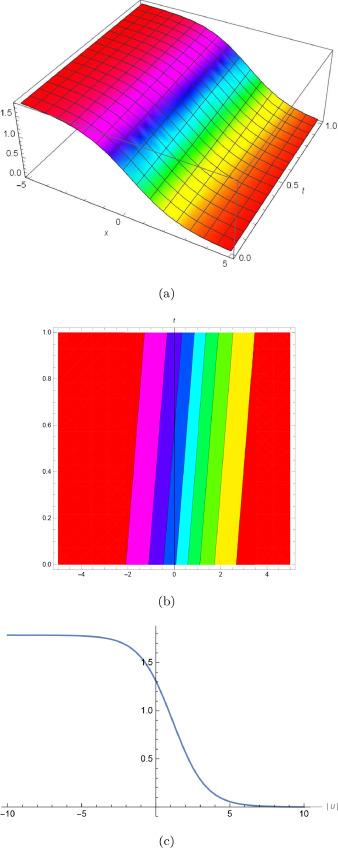
Fig.17 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
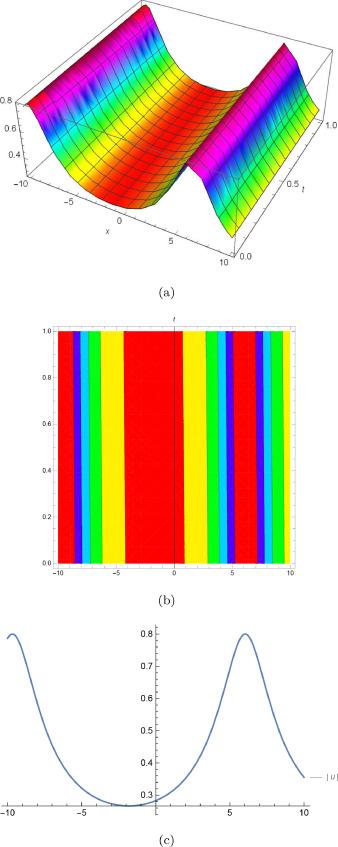
Fig.18 (a) is 3D plot, (b) is contour plot and (c) is 2D plot for solution of for the values of and . |
5. Conclusion
In work, some new exact solutions to the generalized (3 + 1)-dimensional Boiti-Leon-Manna-Pempinelli model have been investigated by employing the -expansion approach, the Bernoulli sub-ODE approach and the modified Kudryashov method. A variety of solitons are observed namely, bright, dark, singular, combo, optical, singular optical, trigonometric functions, trigonometric and hyperbolic functions, and rational solutions and bright-singular combo soliton solutions are demonstrated for details see Fig. 1, Fig. 2, Fig. 3, Fig. 4, Fig. 5, Fig. 6, Fig. 7, Fig. 8, Fig. 9, Fig. 10, Fig. 11, Fig. 12, Fig. 13, Fig. 14, Fig. 15, Fig. 16, Fig. 17, Fig. 18. The computational results are encouraging and can be extended for obtaining novel exact solutions to many complex nonlinear problems arising in engineering and mathematical physics. The symbolic computational work supports the efficacy, reliability, and simplicity of present methodologies. Many higher dimensional nonlinear evolution models that occur in science, mathematical physics, and marine engineering can benefit from these strategies.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}