Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (8): 1024-1033.doi: 10.16183/j.cnki.jsjtu.2021.154
Special Issue: 《上海交通大学学报》2022年“机械与动力工程”专题
• Mechanical Engineering • Previous Articles Next Articles
HUANG Yuhao1, HAN Chao1, ZHAO Minghui2, DU Qiankun1, WANG Shigang1( )
)
Received:2021-05-06
Online:2022-08-28
Published:2022-08-26
Contact:
WANG Shigang
E-mail:wangshigang@sjtu.edu.cn
CLC Number:
HUANG Yuhao, HAN Chao, ZHAO Minghui, DU Qiankun, WANG Shigang. Multi-Objective Optimization Strategy of Trajectory Planning for Unmanned Aerial Vehicles Considering Constraints of Safe Flight Corridors[J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 1024-1033.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.154

Fig.1
Piece-wise polynomial trajectories
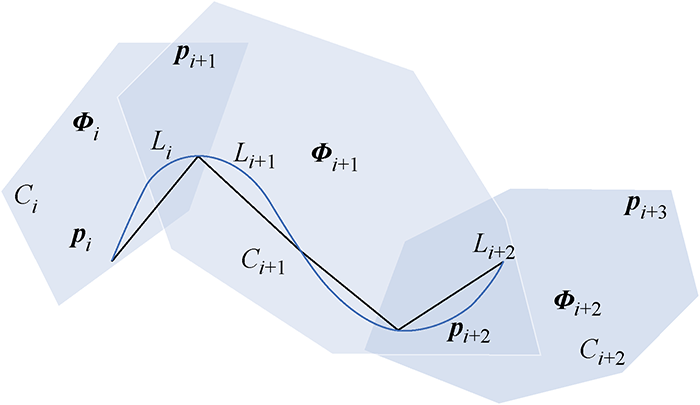

Fig.2
Rewiring operations of RRT* algorithm
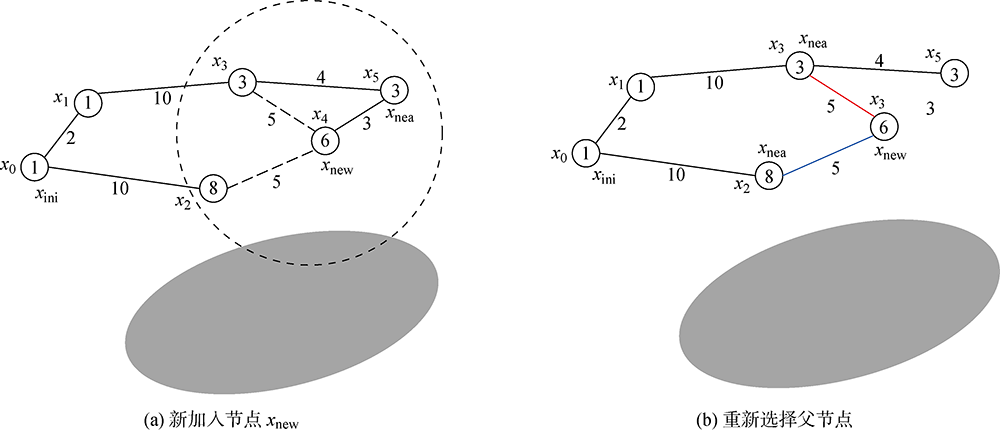
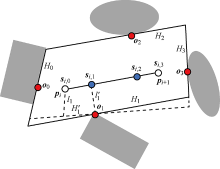
Fig.3
Construction of safe flight corridor
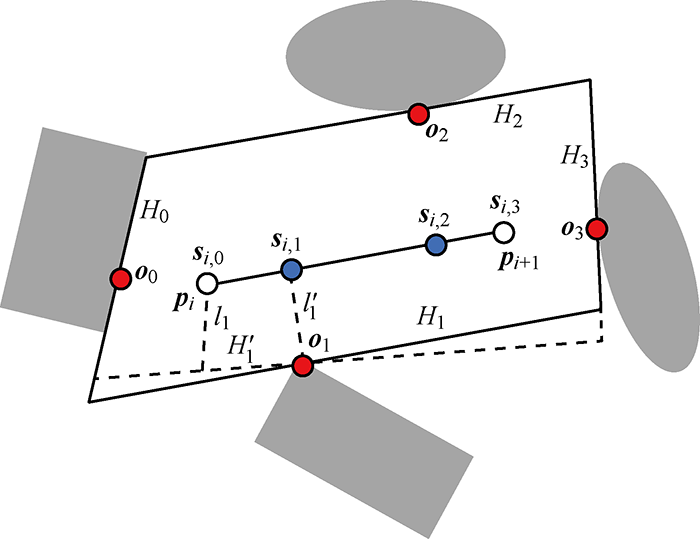
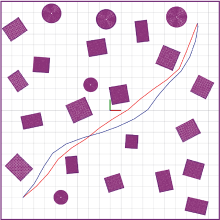
Fig.4
Initial path generated by RRT* algorithm
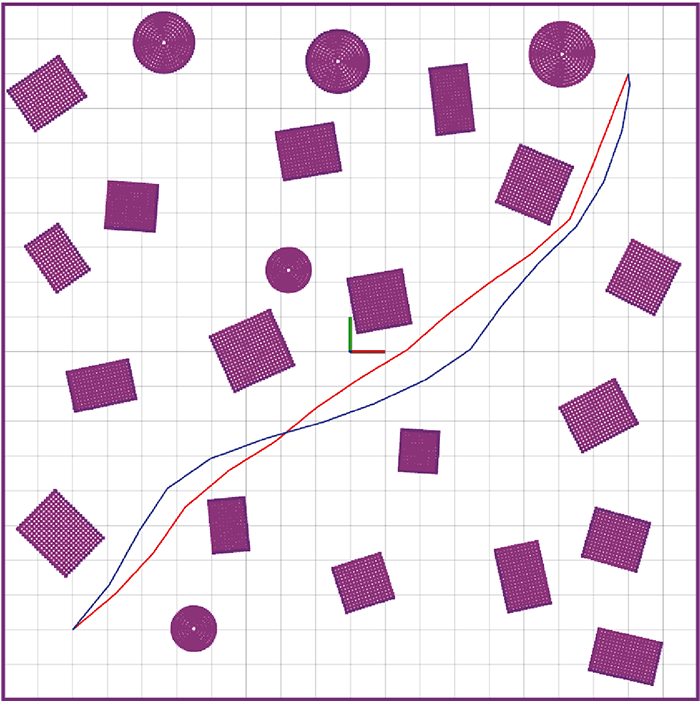

Fig.5
Comparison of initial path generated by two optimization methods

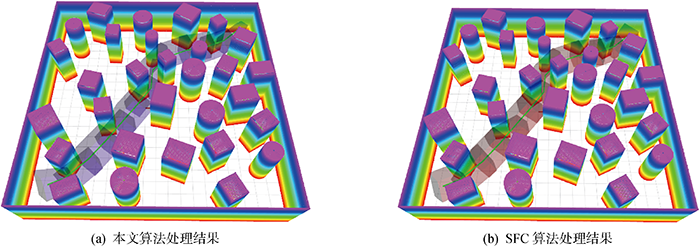
Fig.6
Comparison of SFC and proposed algorithms at an obstacle density of 0.08
Tab.1
Comparison of SFC and proposed algorithms at different obstacle densities
| ρ | 本文算法 | SFC算法 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| | omin/m | | tu/s | | omin/m | | tu/s | ||
| 0.02 | 1.286 | 0.510 | 0.397 | 1.137 | 1.302 | 0.473 | 0.363 | 1.190 | |
| 0.04 | 1.048 | 0.555 | 0.530 | 1.214 | 1.069 | 0.454 | 0.425 | 1.320 | |
| 0.06 | 1.059 | 0.528 | 0.499 | 1.540 | 1.085 | 0.446 | 0.411 | 1.756 | |
| 0.08 | 0.837 | 0.461 | 0.551 | 1.912 | 0.867 | 0.342 | 0.394 | 2.665 | |
| 0.10 | 0.781 | 0.462 | 0.592 | 1.994 | 0.802 | 0.359 | 0.448 | 2.355 | |
| 平均值 | 1.002 | 0.503 | 0.513 | 1.559 | 1.025 | 0.415 | 0.408 | 1.857 | |
Tab.2
Calculated results of obstacle clearance and gradient using safe flight corridors
| pT/m | 安全飞行通道计算结果 | 栅格地图计算结果 | |||
|---|---|---|---|---|---|
| omin/m | g | omin/m | g | ||
| (-7.34,-6.02, 2.00) | 1.15 | (-0.22,-0.98, 0.00) | 1.16 | (-0.18,-0.98, 0.00) | |
| (-3.20,-1.51, 1.65) | 0.54 | (0.08, 0.99,-0.04) | 0.63 | (-0.31, 0.95, 0.00) | |
| (1.02,-1.29, 1.18) | 0.93 | (0.98,-0.22, 0.05) | 0.94 | (0.97,-0.21, 0.01) | |
| (4.28, 1.19, 1.09) | 0.90 | (-0.51, 0.86, 0.03) | 0.92 | (-0.49, 0.87, 0.01) | |

Fig.7
Trajectory generation effects of two algorithms

Tab.3
Comparison of trajectory planning algorithms
| 地图类型 | 本文算法 | GTOP算法 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Js/(m2·s-5) | | tw/s | lw/m | Js/(m2·s-5) | | tw/s | lw/m | ||
| 随机地图 | 69.106 | 1.063 | 21.514 | 23.690 | 108.871 | 1.011 | 29.714 | 23.714 | |
| 走廊地图 | 368.889 | 0.775 | 76.659 | 69.231 | 624.186 | 0.738 | 86.244 | 69.432 | |
| 矿井地图 | 309.090 | 2.157 | 59.893 | 56.435 | 337.129 | 2.139 | 70.404 | 56.948 | |
| [1] | ZHOU Y, RUI T, LI Y R, et al. A UAV patrol system using panoramic stitching and object detection[J]. Computers & Electrical Engineering, 2019, 80: 106473. |
| [2] |
MANSOURI S S, KANELLAKIS C, KOMINIAK D, et al. Deploying MAVs for autonomous navigation in dark underground mine environments[J]. Robotics and Autonomous Systems, 2020, 126: 103472.
doi: 10.1016/j.robot.2020.103472 URL |
| [3] | 赵建霞, 段海滨, 赵彦杰, 等. 基于鸽群层级交互的有人/无人机集群一致性控制[J]. 上海交通大学学报, 2020, 54(9): 973-980. |
| ZHAO Jianxia, DUAN Haibin, ZHAO Yanjie, et al. Consensus control of manned-unmanned aerial vehicle swarm based on hierarchy interaction of pigeons[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9): 973-980. | |
| [4] | CHANDLER B, GOODRICH M A. Online RRT and online FMT: Rapid replanning with dynamic cost[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, Canada: IEEE, 2017: 6313-6318. |
| [5] | CAI Y Z, XI Q B, XING X J, et al. Path planning for UAV tracking target based on improved A-star algorithm[C]// 2019 1st International Conference on Industrial Artificial Intelligence. Shenyang, China: IEEE, 2019: 1-6. |
| [6] | 郝钏钏, 方舟, 李平. 基于Q学习的无人机三维航迹规划算法[J]. 上海交通大学学报, 2012, 46(12): 1931-1935. |
| HAO Chuanchuan, FANG Zhou, LI Ping. A 3-D route planning algorithm for unmanned aerial vehicle based on Q-learning[J]. Journal of Shanghai Jiao Tong University, 2012, 46(12): 1931-1935. | |
| [7] | CHEN J, LIU T B, SHEN S J. Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments[C]// 2016 IEEE International Conference on Robotics and Automation. Stockholm, Sweden: IEEE, 2016: 1476-1483. |
| [8] |
LIU S K, WATTERSON M, MOHTA K, et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1688-1695.
doi: 10.1109/LRA.2017.2663526 URL |
| [9] | STOICAN F, PRODAN I, POPESCU D, et al. Constrained trajectory generation for UAV systems using a B-spline parametrization[C]// 2017 25th Mediterranean Conference on Control and Automation. Valletta, Malta: IEEE, 2017: 613-618. |
| [10] |
SATAI H A, ZAHRA M M A, RASOOL Z I, et al. Bézier curves-based optimal trajectory design for multirotor UAVs with any-angle pathfinding algorithms[J]. Sensors, 2021, 21(7): 2460.
doi: 10.3390/s21072460 URL |
| [11] | RICHTER C, BRY A, ROY N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments[M]. New York, NY, USA: Springer, 2016: 649-666. |
| [12] | INGERSOLL B T, INGERSOLL J K, DEFRANCO P, et al. UAV path-planning using bezier curves and a receding horizon approach[C]// AIAA Modeling and Simulation Technologies Conference. Reston, Virginia: AIAA, 2016: 3675. |
| [13] | LOPEZ B T, HOW J P. Aggressive 3-D collision avoidance for high-speed navigation[C]// 2017 IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017: 5759-5765. |
| [14] | MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]// 2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011: 2520-2525. |
| [15] | OLEYNIKOVA H, BURRI M, TAYLOR Z, et al. Continuous-time trajectory optimization for online UAV replanning[C]// 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon, South Korea: IEEE, 2016: 5332-5339. |
| [16] | GAO F, LIN Y, SHEN S J. Gradient-based online safe trajectory generation for quadrotor flight in complex environments[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, Canda: IEEE, 2017: 3681-3688. |
| [17] |
HORNUNG A, WURM K M, BENNEWITZ M, et al. OctoMap: An efficient probabilistic 3D mapping framework based on octrees[J]. Autonomous Robots, 2013, 34(3): 189-206.
doi: 10.1007/s10514-012-9321-0 URL |
| [18] |
SVANBERG K. A class of globally convergent optimization methods based on conservative convex separable approximations[J]. SIAM Journal on Optimization, 2002, 12(2): 555-573.
doi: 10.1137/S1052623499362822 URL |
| [1] | LOU Jiahui, HUANG Wentao, YANG Huanhong, YU Moduo, YANG Yayu. Operation Trajectory Planning and Path Power Optimization Control of Electric Quay Crane in Ports [J]. Journal of Shanghai Jiao Tong University, 2026, 60(2): 300-310. |
| [2] | Zhang Jingkai, Li Xinde, Wei Wangzichao, Wang Ziyao, Ma Ke. Synthetic Data-Driven Multi-Task Framework for UAV Detection and Classification [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 209-220. |
| [3] | HE Ximei, ZHAO Yisheng, XU Zhihong, CHEN Yong. Resource Allocation Method for Unmanned Aerial Vehicle-Assisted and User Cooperation Non-Linear Energy Harvesting Mobile Edge Computing System [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1220-1231. |
| [4] | CUI Siyuan, LI Hao, FAN Xiangyu, NI Lei, HOU Jiahang. Multi-UAV Cooperative Target Search Method Based on AMDE-DMPC Algorithm [J]. Air & Space Defense, 2025, 8(6): 35-44. |
| [5] | WANG Zhibo, HU Weijun, MA Xianlong, QUAN Jiale, ZHOU Haoyu. Perception-Driven-Controlled UAV Interception and Collision Technology [J]. Air & Space Defense, 2025, 8(4): 78-84. |
| [6] | GE Luqin, DING Shizhou, YAO Qiang, ZHANG Cheng, HUANG Yuchen. Research Review of Electromagnetic Interference Mechanism and Anti-Interference Technology for UAVs [J]. Air & Space Defense, 2025, 8(4): 51-55. |
| [7] | YAO Jiangchuan, ZHANG Mingen, WANG Xiaogang, E Bin, CUI Naigang. Mercator-Projection-Based Online Trajectory Planning Method for Cruise Vehicles [J]. Air & Space Defense, 2025, 8(3): 104-110. |
| [8] | SONG Rui, ZHANG Gang, LIU Siyu, WANG Shichao, QIN Jiaxing, YANG Yi. Cooperative Trajectory Planning for Multi-Near Space Vehicle in Glide Phase [J]. Air & Space Defense, 2025, 8(2): 66-76. |
| [9] | BAI Wenchao, BAN Mingfei, SONG Meng, XIA Shiwei, LI Zhiyi, SONG Wenlong. Coordinate Scheduling Model of Electric Vehicle-Unmanned Aerial Vehicle Joint Rescue System [J]. Journal of Shanghai Jiao Tong University, 2024, 58(9): 1443-1453. |
| [10] | WU Xiaojing∗(武晓晶), CAO Tongyao (曹童瑶), ZHEN Ran (甄然), LI Zhijie (李志杰). AlgoTime-Varying Formation-Containment Tracking Control for Unmanned Aerial Vehicle Swarm Systems with Switching Topologies and a Non-Cooperative Target [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 689-701. |
| [11] | LI Xu, DONG Wei, DU Zehong. Research on Flight Path Planning Under Complex Environmental Constraints [J]. Air & Space Defense, 2024, 7(4): 99-105. |
| [12] | LIU Yuanyuan, ZHOU Leimei, LI Hao, GAO Ziyi. Review of Formation Flight Control Methods for Unmanned Autonomous Air Combat [J]. Air & Space Defense, 2024, 7(4): 47-58. |
| [13] | HUANG Shan(黄山), HUANG Hongzhong(黄洪钟), ZENG Qi(曾奇). Fast Four-Stage Local Motion Planning Method for Mobile Robot [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 428-435. |
| [14] | LIU Zengmin (刘增敏), WANG Shentao(王申涛), YAO Lixiu(姚莉秀), CAI Yunze(蔡云泽). Online Multi-Object Tracking Under Moving Unmanned Aerial Vehicle Platform Based on Object Detection and Feature Extraction Network [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 388-399. |
| [15] | LIN Zhaochen, ZHANG Xinran, LIU Ziyang, HE Fenghua, OUYANG Lei. Deep Learning-Based Hypersonic Vehicle Motion Behavior Recognition [J]. Air & Space Defense, 2024, 7(1): 48-55. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||