Journal of Shanghai Jiao Tong University ›› 2025, Vol. 59 ›› Issue (10): 1568-1580.doi: 10.16183/j.cnki.jsjtu.2023.578
• Electronic Information and Electrical Engineering • Previous Articles
ZHAN Zehui1, ZHONG Ming’en1( ), YUAN Bingan2, TAN Jiawei2, FAN Kang1
), YUAN Bingan2, TAN Jiawei2, FAN Kang1
Received:2023-11-14
Revised:2024-01-04
Accepted:2024-01-17
Online:2025-10-28
Published:2025-10-24
CLC Number:
ZHAN Zehui, ZHONG Ming’en, YUAN Bingan, TAN Jiawei, FAN Kang. Detection of Roadside Vehicle Parking Violations Under Random Horizontal Camera Condition[J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1568-1580.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2023.578
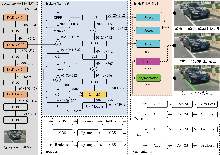
Fig.1
Structure of MTPN model
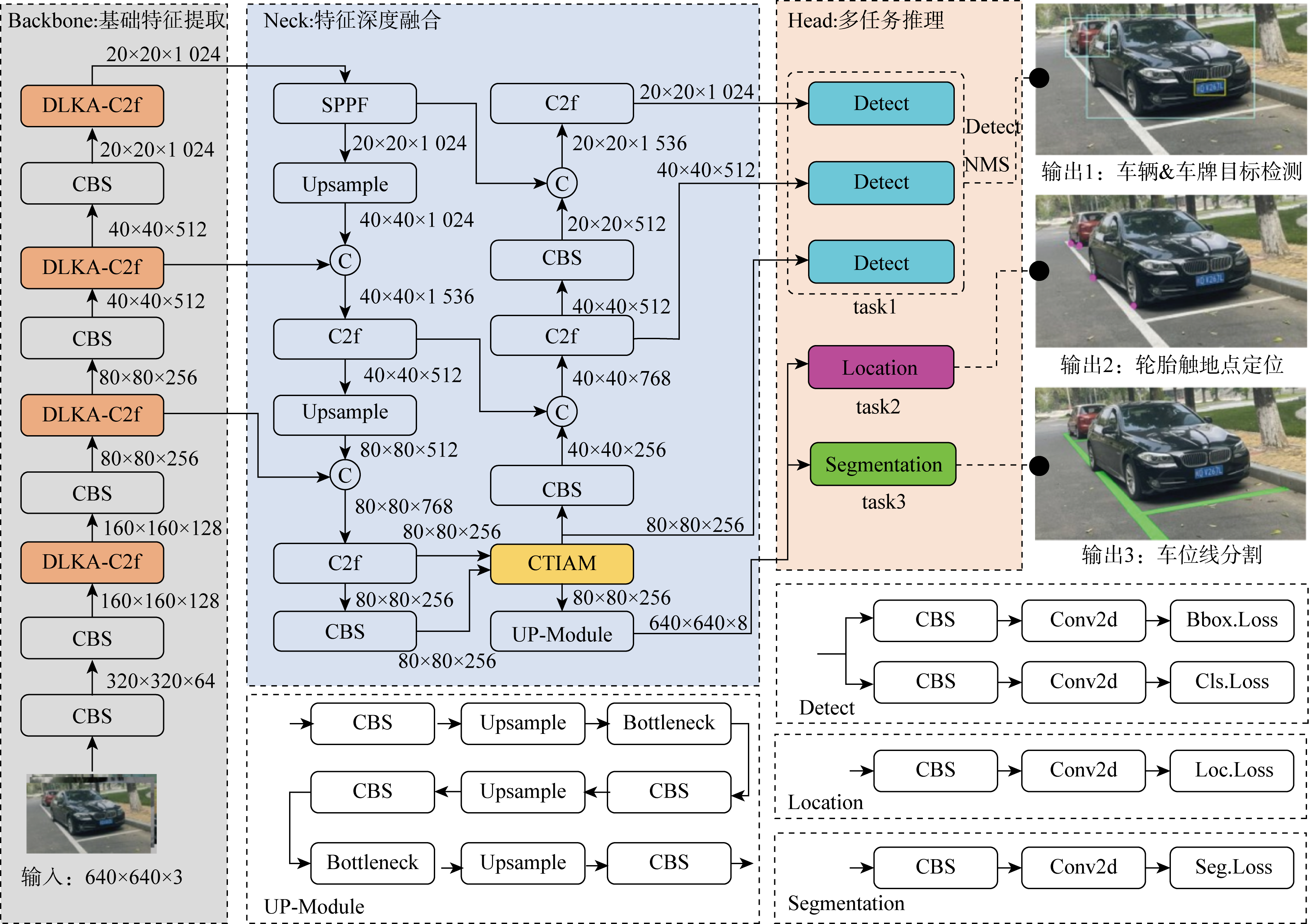
Fig.2
Structure of DLKA-C2f
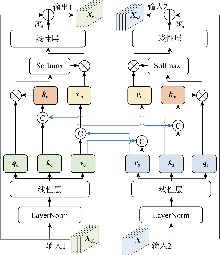
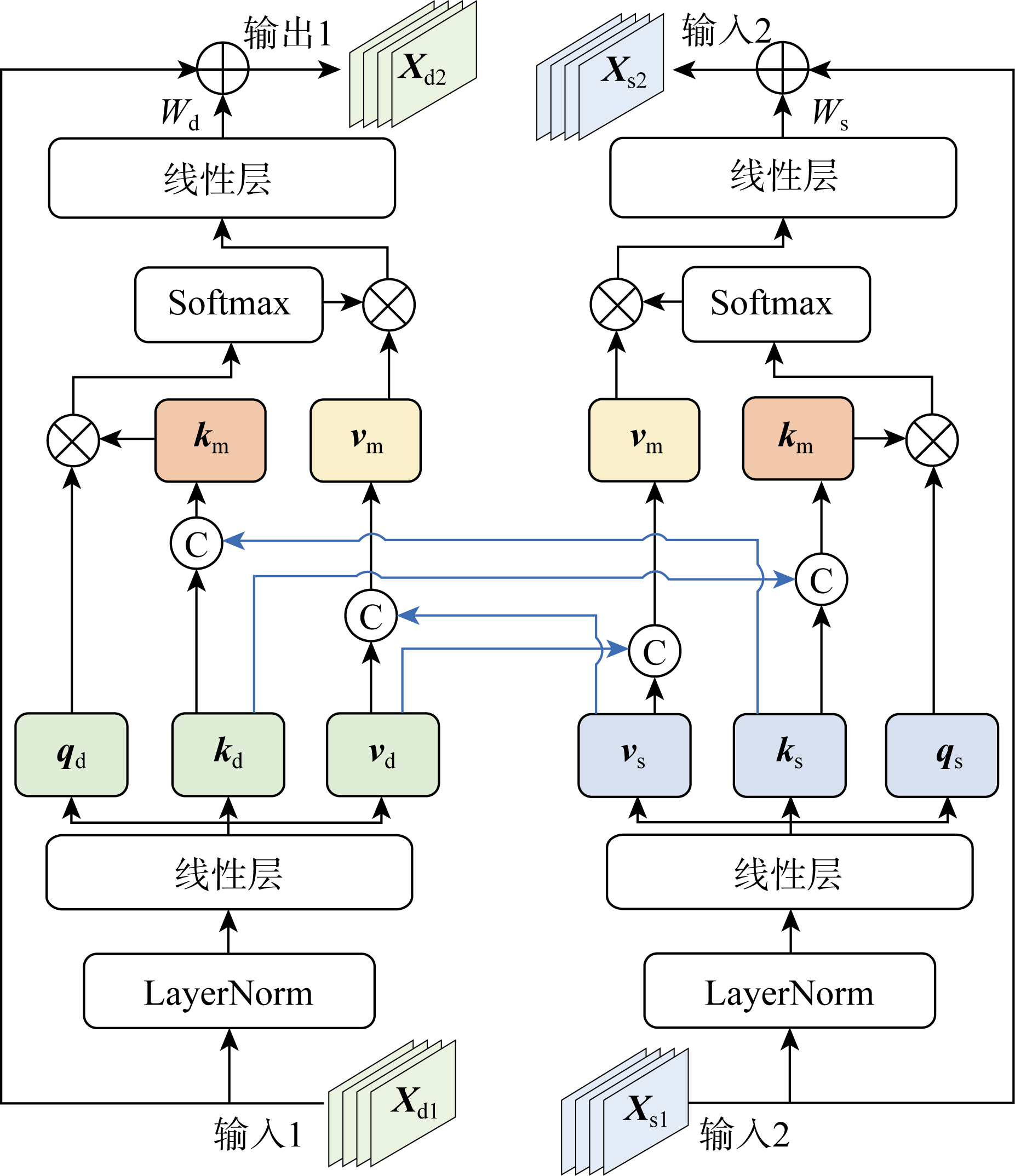
Fig.3
Attention mechanism of cross-task interaction
Tab.1
Search results of weight parameters
| 组别 | α | β | γ | 准确率/% |
|---|---|---|---|---|
| 1 | 0.11 | 0.69 | 0.20 | 96.9 |
| 2 | 0.13 | 0.67 | 0.20 | 97.5 |
| 3 | 0.15 | 0.65 | 0.20 | 98.1 |
| 4 | 0.15 | 0.55 | 0.30 | 97.3 |
| 5 | 0.16 | 0.55 | 0.29 | 96.6 |
| 6 | 0.18 | 0.57 | 0.25 | 96.1 |

Fig.4
Examples of sample images from XMUT-VPI data set

Tab.2
Performance test results of MTPN
| 算法 | mAP/% | R/% | NME/ % | mIoU/ % | 推理速度/ (帧·s-1) |
|---|---|---|---|---|---|
| YOLOX[ | 86.5 | 83.7 | - | - | 85.3 |
| DETR[ | 80.2 | 88.1 | - | - | 28.9 |
| HRNet[ | - | - | 8.1 | - | 88.7 |
| ViTPose[ | - | - | 5.5 | - | 82.5 |
| U2-Net[ | - | - | - | 77.9 | 40.2 |
| DeepLabv3+[ | - | - | - | 79.6 | 32.2 |
| YOLOv8[ | 87.2 | 86.2 | 7.2 | 75.8 | 78.2 |
| MTPN-1 | 89.7 | 85.5 | 5.1 | 77.3 | 75.4 |
| MTPN-2 | 88.5 | 84.9 | 5.6 | 77.8 | 76.2 |
| MTPN | 90.3 | 86.7 | 4.4 | 78.5 | 73.6 |

Fig.5
Examples of MTPN model inference results in typical environments
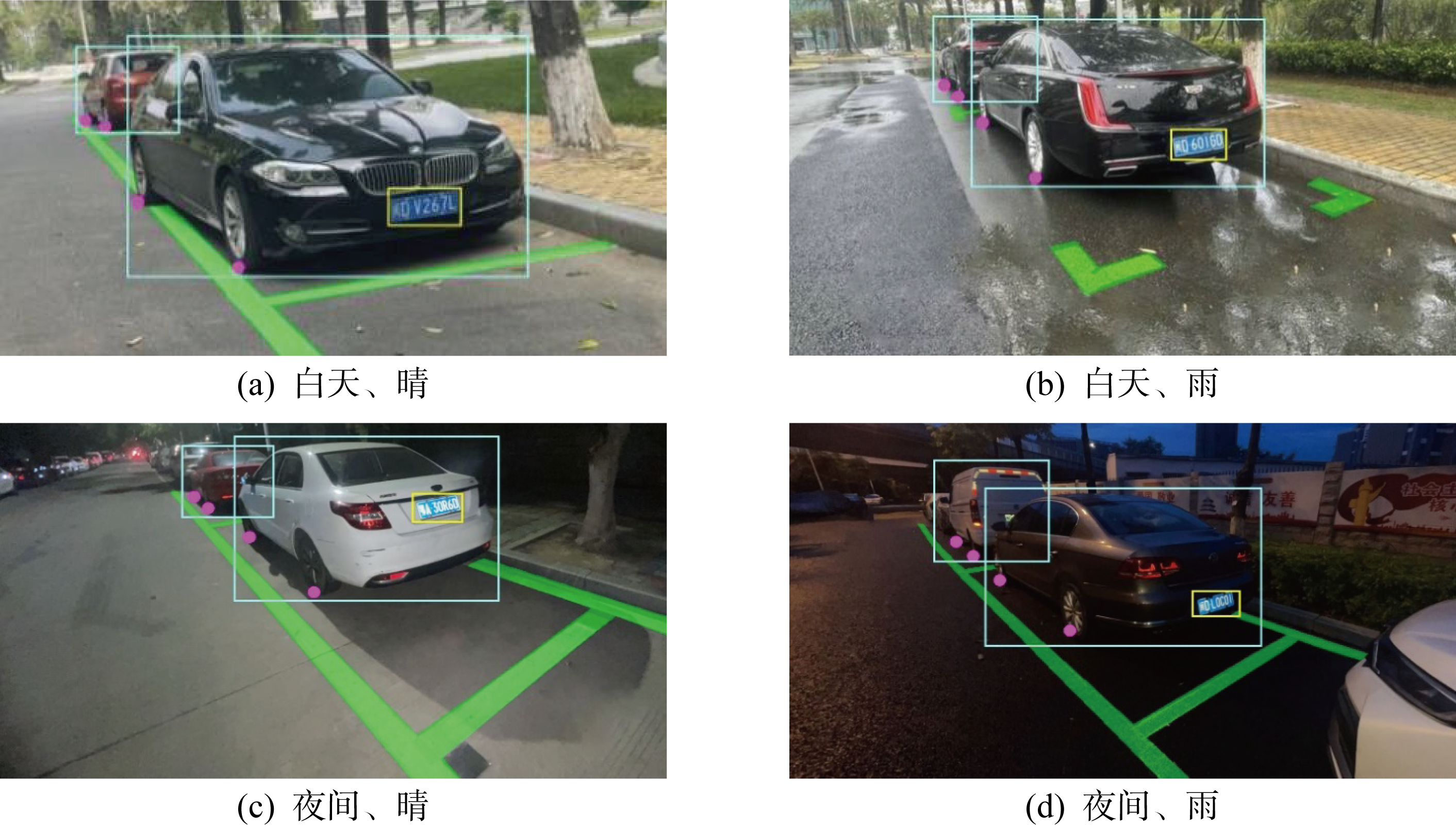
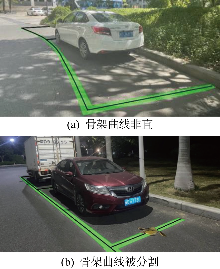
Fig.6
Extraction results of parking space line skeleton curve
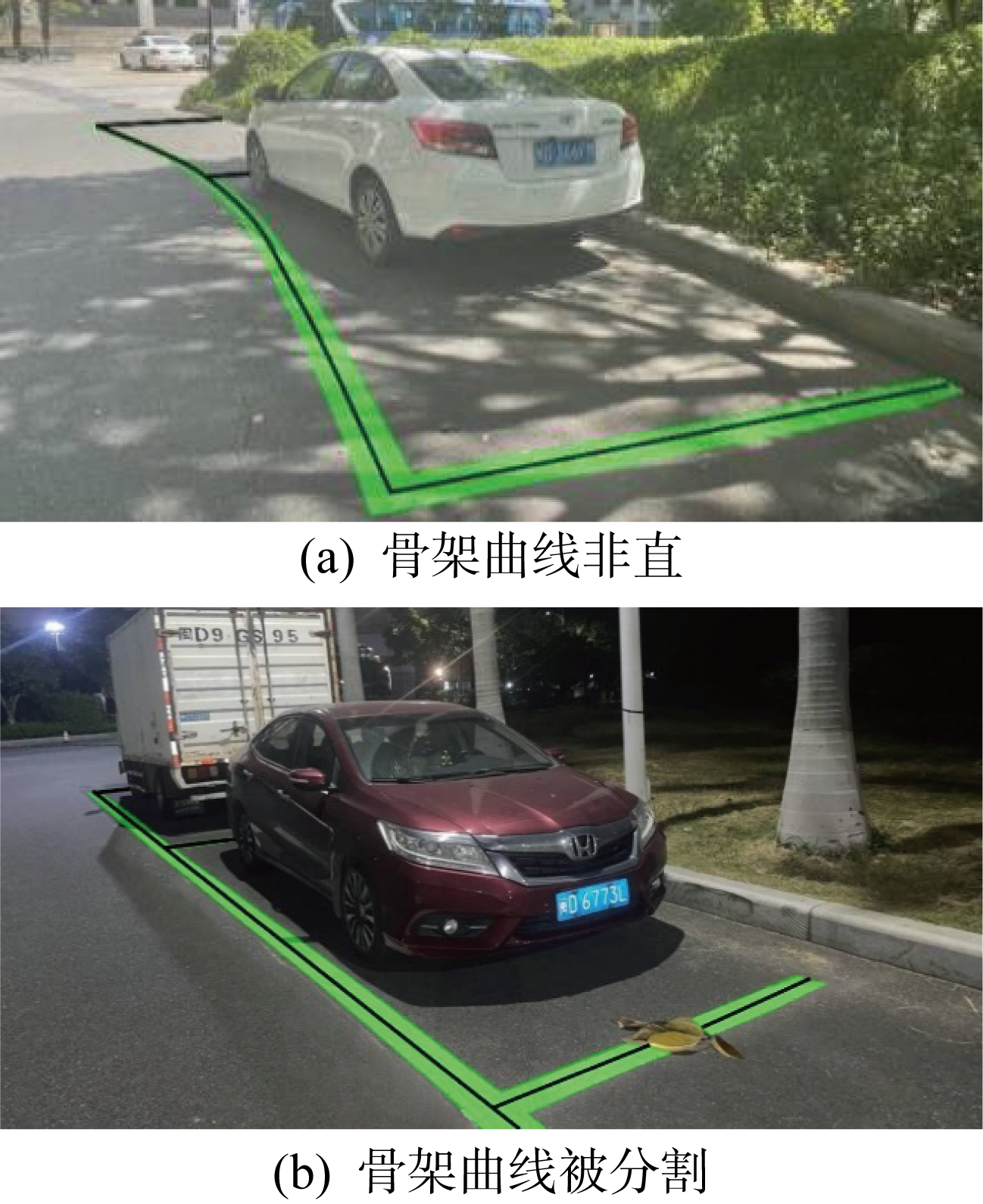
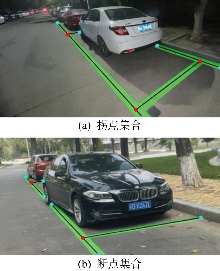
Fig.7
Search results for turning-points and breakpoints of skeleton curves
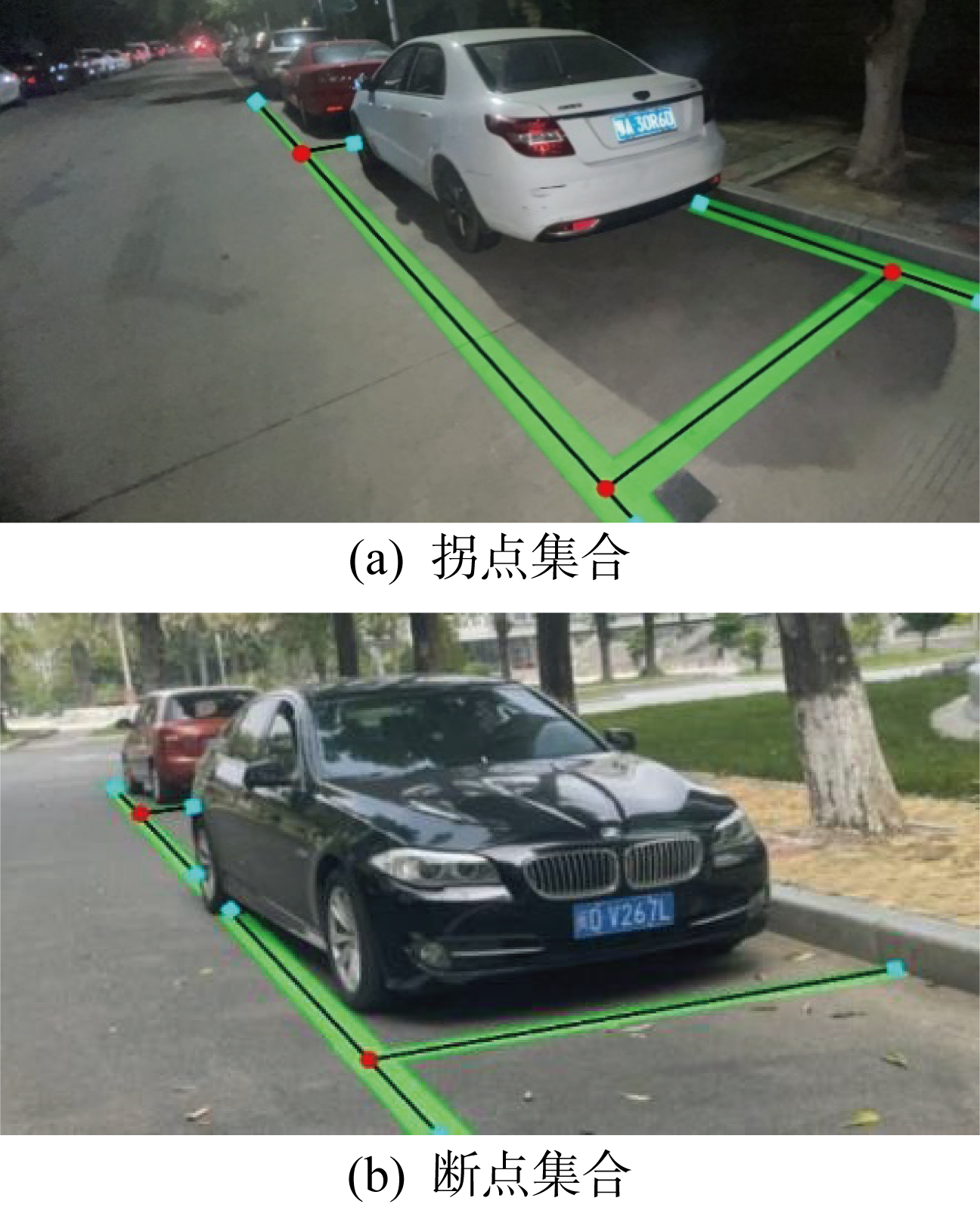

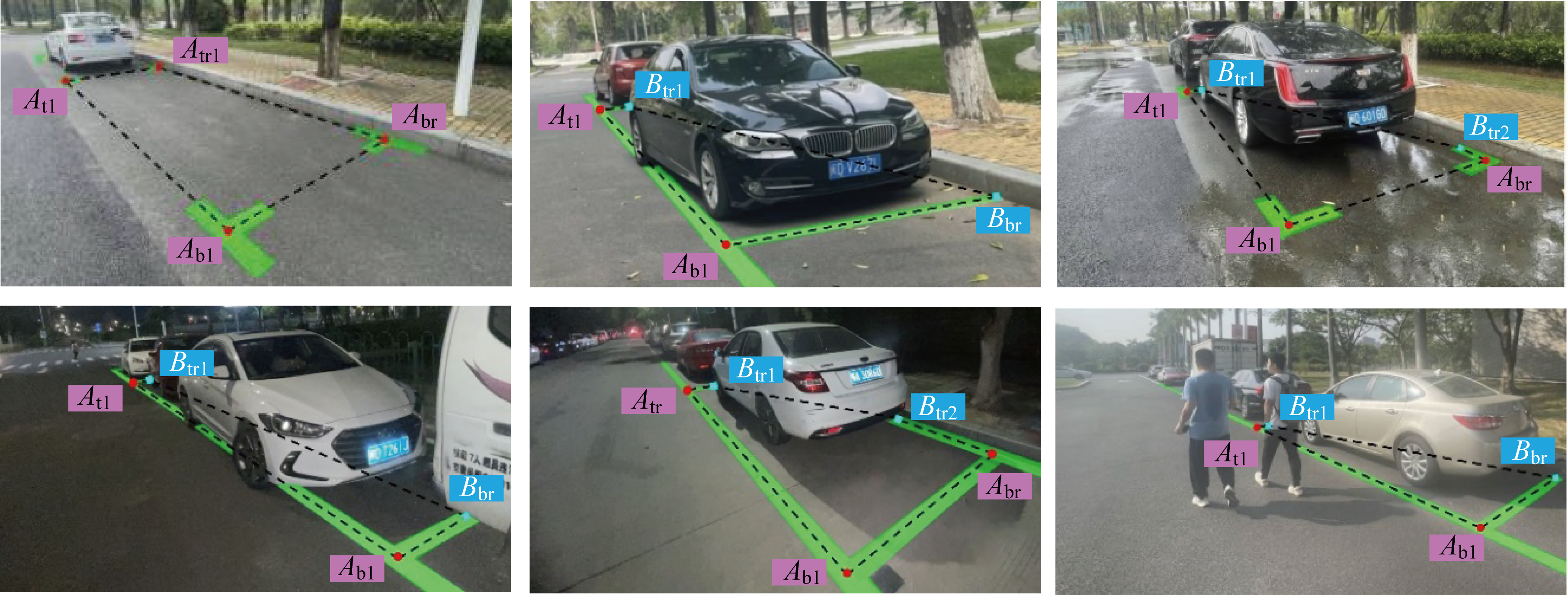
Fig.8
Main parking space at different camera positions and shooting angles


Fig.9
Polygonal viewing area of main parking space
Tab.3
Results of detection test for parking violations
| 环境 | 类别 | 样本数 | 准确率/% |
|---|---|---|---|
| 白天、晴 | 规范停车 | 1457 | 98.8 |
| 不当停车 | 1315 | 97.4 | |
| 违法停车 | 1253 | 98.0 | |
| 合计 | 4025 | 98.1 | |
| 白天、雨 | 规范停车 | 1309 | 98.4 |
| 不当停车 | 1283 | 97.0 | |
| 违法停车 | 1390 | 97.7 | |
| 合计 | 3982 | 97.7 | |
| 夜间、晴 | 规范停车 | 1465 | 99.3 |
| 不当停车 | 1217 | 97.6 | |
| 违法停车 | 1219 | 98.8 | |
| 合计 | 3901 | 98.6 | |
| 夜间、雨 | 规范停车 | 1185 | 98.6 |
| 不当停车 | 1047 | 97.3 | |
| 违法停车 | 1346 | 98.1 | |
| 合计 | 3578 | 98.0 | |
| 总计 | 15486 | 98.1 | |
Tab.4
Algorithm test results of three types of common interference
| 干扰类型 | 类别 | 样本数 | 准确率/% |
|---|---|---|---|
| 遮挡 | 规范停车 | 2246 | 97.2 |
| 不当停车 | 2170 | 97.0 | |
| 合计 | 4416 | 97.1 | |
| 破损 | 规范停车 | 1986 | 98.1 |
| 不当停车 | 2072 | 98.0 | |
| 合计 | 4058 | 98.0 | |
| 脏污 | 规范停车 | 1962 | 97.8 |
| 不当停车 | 1898 | 97.6 | |
| 合计 | 3860 | 97.7 | |
| 总计 | 12334 | 97.6 | |

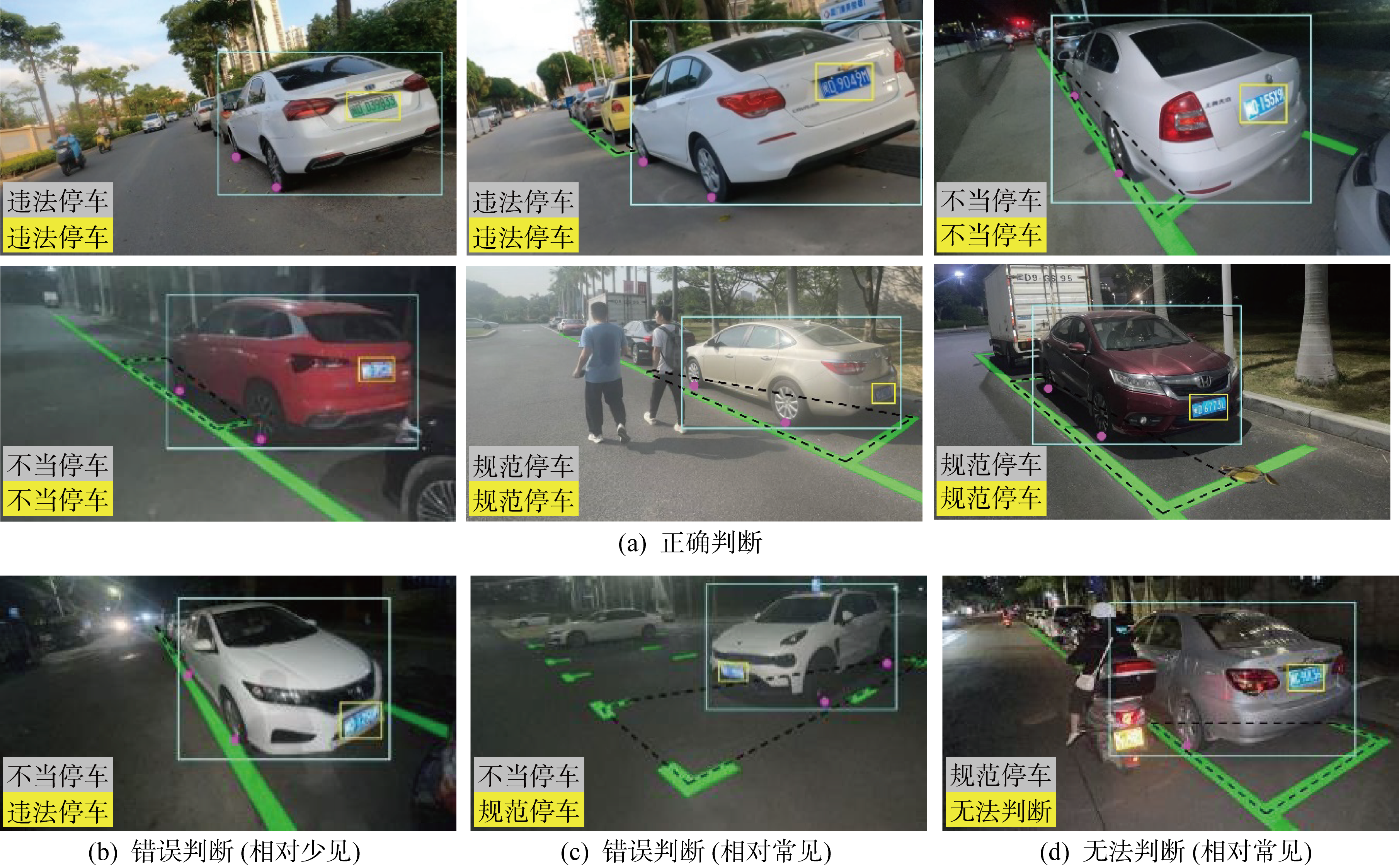
Fig.10
Examples of vehicle parking violation detection results
Tab.5
Comparative experimental results of various algorithms on different data sets
| 算法 | XMUT-VPI | KITTI | Cityscapes | BDD100K | 平均帧率/ (帧·s-1) | 平均耗时/ (ms·帧-1) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 准确 率/% | 帧率/ (帧·s-1) | 准确 率/% | 帧率/ (帧·s-1) | 准确 率/% | 帧率/ (帧·s-1) | 准确 率/% | 帧率/ (帧·s-1) | ||||||
| YOLOv5+Transformer[ | 92.3 | 36.2 | 90.2 | 34.1 | 91.6 | 36.3 | 90.4 | 36.5 | 35.7 | 28.0 | |||
| PP-YOLOE+Transformer[ | 95.7 | 37.1 | 93.6 | 35.2 | 93.5 | 37.0 | 93.1 | 37.2 | 36.6 | 27.3 | |||
| YOLOv3+DeepLabv3+[ | 88.4 | 24.9 | 88.3 | 22.7 | 86.4 | 24.5 | 87.7 | 25.0 | 24.4 | 41.0 | |||
| PSPNet[ | 90.3 | 37.6 | 88.9 | 35.3 | 90.7 | 37.5 | 87.8 | 37.7 | 37.0 | 27.0 | |||
| YOLOv5+射线法[ | 86.7 | 49.5 | 85.5 | 47.5 | 84.9 | 49.6 | 84.5 | 49.5 | 49.0 | 20.4 | |||
| HOG+LBP+PCA+SVM[ | 87.2 | 54.7 | 85.4 | 52.7 | 84.6 | 54.9 | 85.1 | 54.8 | 54.2 | 18.5 | |||
| MTPN +Decoder | 98.1 | 42.3 | 97.5 | 40.2 | 96.7 | 42.2 | 97.2 | 42.5 | 41.8 | 23.9 | |||
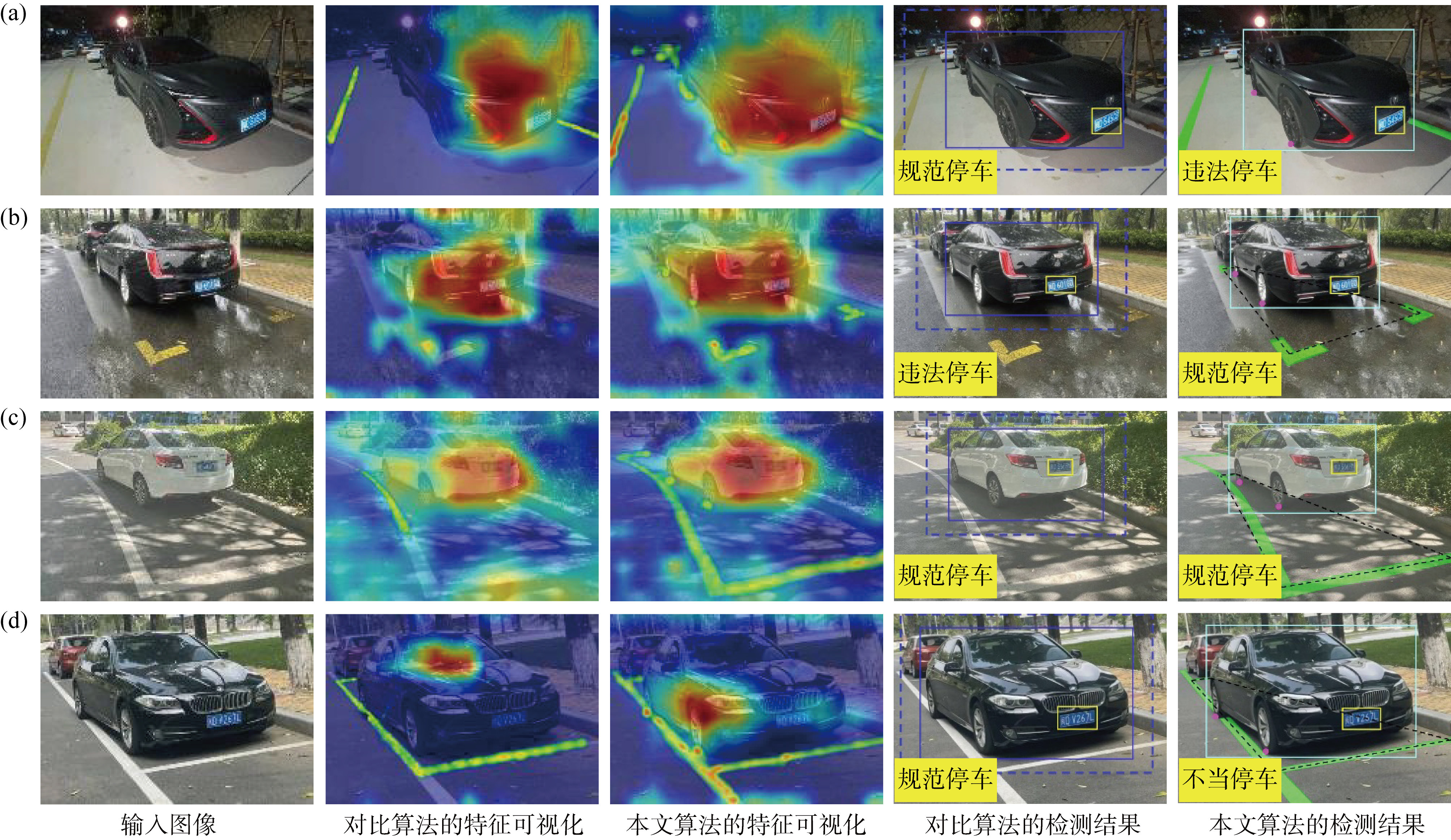
Fig.11
Comparison of prediction results between the proposed algorithm and benchmark algorithm
| [1] | 田爱军, 蔡旭阳, 陈玮, 等. 无人机端路面车辆违停检测及取证系统[J]. 测控技术, 2021, 40(5): 67-74. |
| TIAN Aijun, CAI Xuyang, CHEN Wei, et al. Vehicle illegal parking detection and evidence collection system on UAV[J]. Measurement & Control Technology, 2021, 40(5): 67-74. | |
| [2] | TANG H R, PENG A M, ZHANG D M, et al. SSD real-time illegal parking detection based on contextual information transmission[J]. Computers, Materials & Continua, 2020, 62(1): 293-307. |
| [3] | PENG X G, SONG R, CAO Q, et al. Real-time illegal parking detection algorithm in urban environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 20572-20587. |
| [4] | 吴志华. 基于深度学习的路侧车辆违停检测技术研究[D]. 厦门: 厦门理工学院, 2023. |
| WU Zhihua. Research of a deep learning-based illegal parking vehicle detection and license plate recognition algorithm[D]. Xiamen: Xiamen University of Technology, 2023. | |
| [5] | 赵逸如, 刘正熙, 熊运余, 等. 基于目标检测和语义分割的人行道违规停车检测[J]. 现代计算机, 2020(9): 82-88. |
| ZHAO Yiru, LIU Zhengxi, XIONG Yunyu, et al. Detection of illegal sidewalk parking based on object detection and semantic segmentation[J]. Modern Computer, 2020(9): 82-88. | |
| [6] | YANG Q, YU L F. Recognition of taxi violations based on semantic segmentation of PSPNet and improved YOLOv3[J]. Scientific Programming, 2021, 2021: 4520190. |
| [7] | LIANG X, WU Y, HAN J, et al. Effective adaptation in multi-task co-training for unified autonomous driving[J]. Advances in Neural Information Processing Systems, 2022, 35: 19645-19658. |
| [8] | GUO M H, LU C Z, LIU Z N, et al. Visual attention network[J]. Computational Visual Media, 2023, 9(4): 733-752. |
| [9] |
李擎, 皇甫玉彬, 李江昀, 等. UConvTrans: 全局和局部信息交互的双分支心脏图像分割[J]. 上海交通大学学报, 2023, 57(5): 570-581.
doi: 10.16183/j.cnki.jsjtu.2022.088 |
| LI Qing, HUANGPU Yubin, LI Jiangyun, et al. UConvTrans: A dual-flow cardiac image segmentation network by global and local information integration[J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 570-581. | |
| [10] | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]// 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada: IEEE, 2023: 7464-7475. |
| [11] |
万安平, 杨洁, 缪徐, 等. 基于注意力机制与神经网络的热电联产锅炉负荷预测[J]. 上海交通大学学报, 2023, 57(3): 316-325.
doi: 10.16183/j.cnki.jsjtu.2021.346 |
| WAN Anping, YANG Jie, MIAO Xu, et al. Boiler load forecasting of CHP plant based on attention mechanism and deep neural network[J]. Journal of Shanghai Jiao Tong University, 2023, 57(3): 316-325. | |
| [12] | WANG W H, DAI J F, CHEN Z, et al. InternImage: Exploring large-scale vision foundation models with deformable convolutions[C]// 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada: IEEE, 2023: 14408-14419. |
| [13] | ZHANG X H, CHEN Y, ZHANG H F, et al. When visual disparity generation meets semantic segmentation: A mutual encouragement approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1853-1867. |
| [14] | FENG Z H, KITTLER J, AWAIS M, et al. Rectified wing loss for efficient and robust facial landmark localisation with convolutional neural networks[J]. International Journal of Computer Vision, 2020, 128(8): 2126-2145. |
| [15] | GE Z, LIU S T, WANG F, et al. YOLOX:Exceeding YOLO series in 2021[DB/OL]. (2021-07-18) [2023-11-01]. http://arxiv.org/abs/2107.08430. |
| [16] | CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers[M]//Lecture notes in computer science. Cham: Springer International Publishing, 2020: 213-229. |
| [17] | SUN K, XIAO B, LIU D, et al. Deep high-resolution representation learning for human pose estimation[C]// 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach, USA: IEEE, 2019: 5686-5696. |
| [18] | XU Y F, ZHANG J, ZHANG Q M, et al. ViTPose: Simple vision transformer baselines for human pose estimation[DB/OL]. (2022-04-26) [2023-11-01]. http://arxiv.org/abs/2204.12484. |
| [19] | QIN X B, ZHANG Z C, HUANG C Y, et al. U2-Net: Going deeper with nested U-structure for salient object detection[J]. Pattern Recognition, 2020, 106: 107404. |
| [20] | YANG Z, PENG X B, YIN Z J, et al. Deeplab_v3_plus-net for image semantic segmentation with channel compression[C]// 2020 IEEE 20th International Conference on Communication Technology. Nanning, China: IEEE, 2020: 1320-1324. |
| [21] | LI H X, SU F L. A multi-target ISAR imaging method based on Zhang-Suen thinning and radon transform[C]// 2022 15th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics. Beijing, China: IEEE, 2022: 1-5. |
| [22] | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? The KITTI vision benchmark suite[C]// 2012 IEEE Conference on Computer Vision and Pattern Recognition. Providence, USA: IEEE, 2012: 3354-3361. |
| [23] | CORDTS M, OMRAN M, RAMOS S, et al. The cityscapes dataset for semantic urban scene understanding[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016: 3213-3223. |
| [24] | YU F, CHEN H F, WANG X, et al. BDD100K: A diverse driving dataset for heterogeneous multitask learning[C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle, USA: IEEE, 2020: 2633-2642. |
| [25] | 庄建军, 徐子恒, 张若愚. 基于改进的YOLOv5模型和射线法的车辆违停检测[J]. 南京信息工程大学学报, 2024, 16(3): 341-351. |
| ZHUANG Jianjun, XU Ziheng, ZHANG Ruoyu. Vehicle violation detection based on improved YOLOv5 model and radiometric method[J]. Journal of Nanjing University of Information Science & Technology, 2024, 16(3): 341-351. | |
| [26] | 邵怡文. 基于图像处理技术的违法车辆自动检测系统的优化研究[D]. 青岛: 青岛理工大学, 2021. |
| SHAO Yiwen. Research on optimization of automatic detection system of illegal vehicles based on image processing technology[D]. Qingdao: Qingdao University of Science and Technology, 2021. |
| [1] | ZHOU Bowei, XING Guanyu, LIU Yanli. Rail Line Detection Algorithm Based on Improved CLRNet [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 923-934. |
| [2] | MA Changxi, HUANG Xiaoting, MENG Wei. Predicting Parking Spaces Using CEEMDAN and GRU [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 962-975. |
| [3] | JIANG Wenbo, ZHENG Hangbin, BAO Jinsong. Novel Multi-Step Deep Learning Approach for Detection of Complex Defects in Solar Cells [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 1050-1064. |
| [4] | YANG Zhuang, LI Zhaofei, WANG Jihua, WEI Xudong, ZHANG Yijie. Named Entity Identification of Chinese Poetry and Wine Culture Based on ALBERT [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 1065-1072. |
| [5] | XU Qiang, MA Yuehua, XU Ke, PAN Jun. A Review on Intelligent Radar Target Recognition Methods [J]. Air & Space Defense, 2025, 8(5): 1-9. |
| [6] | XIA Yilin, LIU Gang, YAN Congqiang, CAI Yunze. Research on Deep Learning-Based Rotation Detection Algorithms for Ship Wakes in SAR Images [J]. Air & Space Defense, 2025, 8(5): 64-74. |
| [7] | LIANG Yuwan, XIAO Zhaoyun, LI Mingguang, MENG Jiangshan, ZHOU Jianfeng, HUANG Shanjing, ZHU Haojie. Ground Settlement Prediction by Vacuum Preloading Based on LSTM [J]. Journal of Shanghai Jiao Tong University, 2025, 59(4): 525-532. |
| [8] | ZHAO Ziyu, WANG Xuquan, MA Jie, XING Yujie, DUN Xiong, WANG Zhanshan, CHENG Xinbin. Edge Chip Deployment Methods for Lightweight Infrared Computational Imaging Reconstruction Algorithms [J]. Air & Space Defense, 2025, 8(4): 85-93. |
| [9] | XUE Ang, JIANG Enyu, ZHANG Wentao, LIN Shunfu, MI Yang. Detection of Foreign Bodies in Transmission Line Channels Based on Fusion of Swin Transformer and YOLOv5 [J]. Journal of Shanghai Jiao Tong University, 2025, 59(3): 413-423. |
| [10] | Si Bingqi, Pang Chenxi, Wang Zhiwu, Jiang Pingping, Yan Guozheng. Real-Time Lightweight Convolutional Neural Network for Polyp Detection in Endoscope Images [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(3): 521-534. |
| [11] | Wang Baomin, Ding Hewei, Teng Fei, Liu Hongqin. Damage Detection of X-ray Image of Conveyor Belts with Steel Rope Cores Based on Improved FCOS Algorithm [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 309-318. |
| [12] | Wang Gang, Guan Yaonan, Li Dewei. Two-Stream Auto-Encoder Network for Unsupervised Skeleton-Based Action Recognition [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 330-336. |
| [13] | Nie Wei, Liang Xinwu. Efficient Fully Convolutional Network and Optimization Approach for Robotic Grasping Detection Based on RGB-D Images [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 399-416. |
| [14] | XU Wangwang1,2 (徐旺旺), XU Liangfeng1,2 (许良凤), LIU Ninghui3(刘宁徽), LU Na3(律娜). Histological Image Diagnosis of Breast Cancer Based on Multi-Attention Convolution Neural Network [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 91-106. |
| [15] | A. Sahaya Anselin Nisha1* , NARMADHA R.1 , AMIRTHALAKSHMI T. M.2,BALAMURUGAN V.1, VEDANARAYANAN V.1. LOBO Optimization-Tuned Deep-Convolutional Neural Network for Brain Tumor Classification Approach [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 107-114. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||