
1. Introduction
The nonlinear evolution equations, as well as their solutions, are highly significant with regards to a good understanding of diverse physical phenomena, for example, in the investigation of the waves observed in plasma, astrophysics, optical fibers, laser, fluids, water waves alongside other areas bothering on engineering. Investigation of autonomous nonlinear evolution equations possesses largely a very rich and long history. For instance, in [1], the generalized variable coefficient Korteweg-de Vries equation with dual power-law nonlinearities possessive of linear damping as well as dispersion terms in quantum field theory were studied. Besides, the significance of the equation in quantum field theory and other theoretic physics areas were highlighted. Moreover, a generalized system of variable-coefficient modified Kadomtsev-Petviashvili-Burgers-type equation in three dimensions was examined in [2]. The authors in [3], investigated the generalized advection-diffusion equation, an important nonlinear evolution equation in fluid mechanics, featuring the transit of buoyancy-projecting-plume existing in a bent-on bibulous medium. A generalized Korteweg-de Vries-Zakharov-Kuznetsov equation in [4], was also examined. The equation recounts the fusion of warm inviscid fluid and hot isochoric alongside a cold static environment which has significance in fluid dynamics. Besides, in [5], a modified-generalized Zakharov-Kuznetsov (ZK) model, delineating ion-acoustic gravitation solitary waves found in a magnetoplasma-electron-positron-ion that exists in the primordial universe was contemplated. This equation was invoked in modelling situations in plasma physics. Moreover, in [6] a study was carried out on interaction characteristics of the vector bright solitons observed via the examination of the coupled Fokas-Lenells system. This system models the femtosecond optical pulses existing in a birefringent optical fibre.
Consequently, nonlinear evolution equations have continued to attract the attention of mathematicians and physicists in these recent years. Further to that, exact or analytic solutions to these equations have been regarded as the key tool for scientists to know the various physical happenstances that govern the real world today. Therefore, searching for exact travelling wave solutions relative to these nonlinear evolution equations plays a key role in the examination of nonlinear physical phenomena that can be associated with many other fields besides the aforementioned areas like meteorology, electromagnetic theory, nonlinear optics as well as other areas of science.
Meanwhile, in recent times scientists have developed effective techniques to obtain viable analytical solutions to nonlinear evolution equations, such as Cole-Hopf transformation approach [8], generalized unified technique [9], [10], exp -expansion technique[11], [12], F-expansion technique [1], Painlevé expansion approach [13], mapping technique and extended mapping technique [14], [15], Adomian decomposition approach[16], homotopy perturbation technique[17], Bäcklund transformation [18], rational expansion technique [19], tan-cot approach [20], extended simplest equation method[21], Hirota technique [22], Lie group analysis [23], [24], [25], [26], [27], bifurcation technique [28], the expansion method [29], Darboux transformation approach [30], sine-Gordon equation expansion technique [31], Kudryashov method [32], exponential function technique [33], [34], tanh-function technique[35], ansatz technique[36], [37], tanh-coth approach[38], and on and on, the list continues.
Many years back, Zakharov and Kuznetsov[39] introduced an equation modelling nonlinear ion-acoustic waves embedded in a magnetized plasma which comprises cold as well as hot isothermal electrons. The quantum plasmas alongside their new characteristics have captivated the attention of scientists from both theoretical as well as experimental standpoints. Due to the reason that it plays a key role in carrying charge whenever the de Broglie wavelength surpasses the Debye wavelength and as well as approaches the Fermi wavelength[40]. The character of the waves that are weakly nonlinear ion-acoustic which exists in the presence of a magnetic field that is described to be uniform, is administered by the quantum Zakharov-Kuznetsov (QZK) equation. Various authors have investigated the effect of such a magnetic field in diverse quantum plasma models [41].
The two-dimensional Zakharov-Kuznerov equation (ZK)[42]
has been investigated by researchers. In [42], Krishnan and Biswas employed the mapping technique to achieve the solutions of (1.1). The solutions found include shock waves, cnoidal waves, and periodic singular waves alongside solitary waves. Besides, ZK Eq. (1.1) with power-law nonlinearity given as
was also studied by the authors where the ansatz approach was engaged in securing topological solitons and shock wave solutions for some specific values for the parameters of the power law. In [43], Abdou achieved the solutions of ZK (1.1) by utilizing the simplified form of Hirota's bilinear technique. Wazwaz [44], [45] studied equation (1.1) via the use of extended tanh, sine-cosine, with homotopy analysis techniques to gain solutions to the equation. He found solutions in the structure of soliton solutions. In addition, hyperbolic function solutions such as coth and tanh combined, new travelling wave solutions as well as periodic solutions were also gained. Moreover, the author in [46] obtained analytic solutions of the generalized version of (1.1) with time-dependent coefficients and nonlinear dispersion by employing the solitary wave ansatz technique. In [47], the authors found some closed-form solutions of (1.2) via Lie symmetry analysis. They also secure the conserved quantities of the equation by employing Ibragimov's conservation law theorem.
with , and regarded as real-valued constants whereas stands for electrostatic wave potential existing in plasmas which is obviously a function depending on spatial variables , as well as the temporal variable . The first term in QZK (1.3) is regarded as the temporal term of evolution, the coefficient of taken as the nonlinear term whereas the coefficient of as well as that of denotes the spatial dispersions which are multi-dimensional. The QZK equation (1.3) recounts ion-acoustic waves that are discovered to be included in a magnetized plasma consisting of hot isothermal alongside cold ions electrons. In [48], Wang et al. engaged group theorem to secure a plethora of analytic solutions of (1.3). Moreover, the authors in [49] found the closed-form solutions of QZK (1.3) with the use of a simplified structure of the bilinear technique, sech approach as well as tanh method. Multiple solitons solutions of the equation were gained. Lately, Jiang et al. in [50] carried out a Lie group analysis of the equation and achieved the conserved quantities of the equation via the utilization of Ibragimov's theorem for the conserved vector.
Remarkable is the fact that symmetry plays a highly significant role in various fields of nature, most especially in integrable systems for the existence of infinitely many symmetries. This technique was introduced towards the end of the nineteenth century, by the Norwegian mathematician, named Sophus Lie. The notion of the Lie group was to study the solutions to differential equations. Roughly speaking, one can say that a Lie point symmetry of a system refers to a local group of transformations that ensures the mapping of every solution of the system to another solution that belongs to the same system. The rigours of achieving an increasing number of solutions of systems of partial differential equations are associated with the group properties of these differential equations. In order to get the Lie point symmetry of a nonlinear equation, diverse effective methods have been proposed, such as the classical Lie group method[26], [51], nonclassical method [52], [53], symmetry reduction[54], [55], and so on. Lie's method is an efficient and the simplest technique among group theoretic techniques and a vast number of equations [56], [57] have been solved with the aid of this technique.
In the same vein, conservation laws have been viewed to serve a leading role in examining differential equations, since they delineate physical conserved quantities, consisting of energy, mass, momentum as well as charge together with other motion constants[4], [58]. Conservation laws have also been utilized to carry out investigations on the existence, uniqueness, as well as stability of solutions regarding nonlinear partial differential equations (NLNPDE) [59]. Moreover, they have as well been applied to numerical techniques [60]. In consequence, it is an optimum necessity to examine the conservation laws of partial differential equations.
1.1. Governing equation
with parameters , , , and taken as real-valued constants with .
The paper is then catalogued as follows. The first goal of this paper is to carry out the symmetry analysis of the generalized (2+1)-dimensional extended quantum Zakharov-Kuznetsov Eq. (1.4) and this is comprehensively explicated in Section 2. In addition, an optimal system of one-dimensional subalgebras of the symmetries found is computed. Section 3 furnishes the similarity reductions and various group-invariant solutions of (1.4). In Section 4, abundant cnoidal and snoidal waves of the understudy model are achieved via the extended Jacobi elliptic function expansion technique for some particular cases of . Soliton wave dynamics of the secured solutions through numerical simulation are presented in Section 5, whereas in Section 6, we outline the application of our results in oceanography and ocean engineering. Lastly, conserved currents of (1.4) is constructed in Section 7 via the application of Noether's theorem after which we have the concluding remarks as well as future scope, presented. We notice that the investigation carried out in this paper as catalogued in Sections earlier given, furnishes a plethora of new copious solitons, cnoidal and snoidal waves of (1.4) whose applications in oceanography and ocean engineering fields have never been presented. Thus, the current study bridges this gap, thereby suggesting various possible applications which can be used by oceanographers and ocean engineers in their analysis.
2. Lie group analysis and optimal system of (1.4)
This section furnishes all the pertinent steps of the Lie group technique (whose potency has earlier been given), to enclose this research work within self-bound. We shall calculate Lie point symmetries as well as the 1-D (one-dimensional) optimal system of Lie subalgebras for the 3D-gextQZKe (1.4). Thereafter, we implore the subalgebras to construct classical solutions to the equation.
2.1. Classical Lie point symmetries of (1.4)
Here in this subsection, Let's first contemplate the one-parameter Lie group of infinitesimal transformations;
with standing for the parameter of the group alongside , , , serving as the infinitesimals of the transformations depending on , , , and . Thus utilizing (one-parameter) Lie group of infinitesimal transformation in compliance with invariant conditions [25], solution space of 3D-gextQZKe (1.4) stays invariant and can as well transform into another space.
In accordance with the technique for deciding the infinitesimal generators of nonlinear differential equations (NLDE), we shall secure infinitesimal generator of (1.4). Symmetry group of 3D-gextQZKe (1.4) will be calculated by exploiting the vector field structured as with and regarded as the coefficient functions of the vector field depending on . Vector is a Lie point symmetry of (1.4) if invariance condition
whenever holds. Here Pr denotes the third prolongation of and is defined as
with the , , , , and expressed as[25]
whereas the included Lie characteristic function is presented as
where we also express total derivative in this regard as
which is the operator of total differentiation. Splitting the expanded form of (2.6) over various derivatives of , we obtain these overdetermined system of linear PDEs
which can be solved without much stress. Thus, we have where are arbitrary constants. Hence, we have the following Lie point symmetries:
Theorem 2.1. The 3D-gextQZKe (1.4) admits a four-dimensional Lie algebra spanned by vectors .
Next, we exploit the group of infinitesimal transformations associated with the obtained generators (2.11). First, we state a theorem to that effect.
Theorem 2.2. Given the infinitesimal transformations (2.5) , the associated one-parameter group is computed from the solution of the Lie equations alongside their respective initial conditions expressed as
We secure the group of transformations corresponding to the infinitesimal generators by solving the Lie equations given in theorem (2.2) with their respective initial conditions for each of the generators. For instance, in the case of , we have
whose solution is revealed as
Therefore, taking the same steps in the case of other symmetries, we have one-parameter groups generated by as
Theorem 2.3. Suppose u(x,y,t) is a solution of 3D-gextQZKe (1.4) , so are the functions
Remark 2.1. The Lie group is a normal Lie subgroup of . The Lie algebra generated by , and is an ideal of .
2.2. Construction of 1-D optimal system of subalgebras for (2.11)
It is impractical for the full list of all possible group-invariant solutions to be given. Consequently, there is a need for us to engage an effective and systematic approach to classify these solutions; once this is achieved, then we form an optimal system of group-invariant solutions. The more technical issue came up in a bid to do the classification of the subalgebra of Lie algebra occasioned by the obtained Lie point symmetries. Nevertheless, we overcome the barrier by adopting a standard procedure given in [23], [25] to secure all the one-dimensional subalgebras involved. We first present the commutative products for decided by according to Lie algebra relation: . This is presented in Table 1. Apparently, is closed under the Lie bracket. Next, construction of the adjoint table is done in Table 2, according to the relation
Table 1 Commutator table of the Lie algebra of 3D-gextQZKe (1.4). |
| [ ] | Empty Cell | ||||
|---|---|---|---|---|---|
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | 0 | ||
| 0 | 0 |
Table 2 Adjoint representation table of the Lie algebra of 3D-gextQZKe (1.4). |
| Ad | Empty Cell | ||||
|---|---|---|---|---|---|
From the linear combination
3. Similarity reduction, group invariant solutions and direct integration of 3D-gextQZKe (1.4)
Having decided the optimal system of one-dimensional subalgebras, we contemplate the symmetry reductions of (1.4) via the integration of the Lagrangian system associated with each symmetry.
Case 1. Subalgebra
The differential invariants occasioning the similarity variables for can be determined by finding solutions to the Lagrangian system associated with , that is
System (3.13) produces the similarity variables
Inserting the values of , and in (1.4), we secure PDE
which gives rise to the translation generators
Imputing the invariants and group-invariant secured from the use of and , we reduce 3D-gextQZKe (1.4) to third-order nonlinear ordinary differential equation (NODE) written simply as
where
The summary of the reduction outcomes from the remaining members of the optimal system is given in Table 3.
Table 3 Summary of optimal system of (1+2)-D gKPle (1.4). |
| Cases | Element selections | Optimal System | Empty Cell |
|---|---|---|---|
| 1. | , , , | ||
| 2. | , , , | ||
| 3. | , , , | ||
| 4. | , , , |
Table 4 Reduction summary for 3D-gextQZKe (1.4) through the dual and triple Lie vectors. |
| Vectors | Variables transform | Symmetries | Reduced equation |
|---|---|---|---|
| , | , | ||
| , | , | ||
| , | , | ||
3.1. Direct integration of the reduced equations
We secure the exact solutions of 3D-gextQZKe (1.4) by direct integration of the NODE earlier obtained via symmetry reductions.
Case a.
Subalgebra is reduced to nonlinear ordinary differential equation (NODE)
Integration of ODE (3.18) once with regards to gives
with and regarded as integration constant. Repeating the process of integration one more time after multiplying (3.19) by first derivative of , one gets the first-order nonlinear ordinary differential equation (FNODE)
where and stands for integration constant. Taking the constants of integration to be zero, integrating (3.20) and reverting to the original variables gives a non-topological soliton solution
where with regarded as an integration constant. In a bid to view the dynamics of solution (3.21), we present the graphic display of the solution with dissimilar values of the involved parameters for and in Figs. 1 and 2 accordingly.
Next we get analytic solutions of 3D-gextQZKe (1.4) via direct integration by considering the members of the optimal systems with triple vectors.
Case b.
Subalgebra transforms (1.4) to third-order NODE
Integration of Eq. (3.22) just as we earlier demonstrated, we have a NODE
with . We contemplate equation (3.23) and set , therefore transforming to
Obviously, Eq. (3.24) can be presented simply as
with
We note here that an ODE of the type
where is a constant has solutions
with , when , see[61]. Therefore, by comparing the form taken by Eqs. (3.25) and (3.27), we see that they are symmetric at . Hence 3D-gextQZKe (1.4) possesses bright and singular soliton solutons presented respectively as
with and the constraint that , in solution (3.29). Moreover, , in solution (3.30) and . The streaming pattern of the solutions for and are given in Figs. 3, 4, 5 and 6.
Case c.
Subalgebra reduces 3D-gextQZKe(1.4) to NODE
which on integration a couple of times and allowing the constant of integration to be zero yields
We add that in Eq. (3.32). Adopting the technique applied in securing solutions of (1.4) in Case b, we have soliton solutions
with and the constraint that , in solution (3.33). Moreover, , in solution (3.34) and . We present the pictorial representations of solutions (3.33) and (3.34) in Figs. 7, 8, 9 and 10.
4. Exact solutions of 3D-gextQZKe (1.4)
This subsection presents more general closed-form solutions of (1.4) via some standard techniques. Therefore we aim to secure solutions of the underlying equation by contemplating some special cases of .
4.1. Solution of (1.4) via extended Jacobi elliptic function expansion technique
This subsection constructs the closed-form solutions of (1.4) with the aid of extended Jacobi elliptic function expansion technique[4]. We assume a formal solution of the third-order NODE (3.22) as
where we aim to achieve the value of positive integer by adopting balancing procedure, see[62]. We declare here that function satisfies the first-order NODE
or
We remind ourselves of the fact that
the Jacobi cosine-amplitude function is the solution of (4.36) whereas the solution to NODE (4.37) is the Jacobi sine-amplitude function
We quickly recall here that when , then we have and when , then . In the same vein, when , then and .
4.1.1. Cnoidal wave solutions of NODE (3.18)
Case. 1. When n=1,
In considering the solution of NODE (3.18), firstly, we investigate the case of n=1. It is observed that balancing procedure produces the value of as , therefore (4.35) assumes the form
Inserting the value of from (4.40) into (3.18) and utilizing (4.36), we get the system
whose solution using Maple software produces the values of as
where . General solutions associated with (4.41) and (4.42) are respectively given as
with and . The behaviour of solutions (4.43) and (4.44) are displayed graphically in Figs. 11 and 12.
Case. 2 When n=2
In this case the balancing term has the value , so (4.35) becomes
Substituting the value of from (4.45) into (3.18) in association with (4.36), we obtain an algebraic equation which when split gives the system
The system yields the solution
where , . Therefore the related general solutions to (4.46) alongside (4.47) are respectively
with as well as . The pictorial representations of the solutions are given accordingly in Figs. 13 and 14.
4.1.2. Snoidal wave solutions of (3.18)
Case. A. When n=1,
We consider the NODE (3.18), for case of n=1 and as earlier shown the balancing term and then the assumed solution (4.35) is
Replacing the value of from (4.50) in (3.18) in conjunction with (4.37), and following the procedure earlier demonstrated, we achieve thirteen system of equations whose solution produces the results of ,and as
Consequently, we have general solutions associated with (4.51) and (4.52) are given respectively as
where and . The behavioural pattern of solutions (4.53) and (4.54) with unalike values of the involved parameters are respectively given in Figs. 15 and 16.
Case B. When n=2
In this case as previously shown and as such (4.35) becomes
Introducing the value of given in (4.55) into (3.18) in consonance with (4.37), we gain an algebraic equation which when split yields a system which gives the solution expressed as
where . Thus, we have the general solution corresponding to (4.56) and (4.57) as
where and . We exhibit the dynamics of solutions (4.58) and (4.59) with dissimilar values of the involved parameters in Figs. 17 and 18.
4.2. Solutions of (3.22) using extended Jacobi function expansion technique
Here, we gain cnoidal and snoidal waves solutions of (3.22) using extended Jacobi function expansion techniques for and .
4.2.1. Cnoidal wave solutions of NODE (3.22)
Case. 1. When n=1,
Here, contemplating the NODE (3.22), we first consider a case of n=1. Thus, balancing procedure produces and then (4.35) assumes the structure
We follow the procedure highlighted earlier and achieve three possible solutions of the seven system of equations obtained using Mathematica as
with , , . Therefore, we secure general solution of (1.4) with regards to the solutions itemized in (4.61)-(4.63) respectively as
with and . The streaming character of solutions (4.64), (4.65) and (4.66) are accordingly shown in Figs. 19, 20 and 21 with the use of unalike values of the involved parameters.
Case. 2 When n=2
In this case the value of balancing term and so (4.35) becomes
Substituting the value of from (4.67) into (3.22) in conjunction with (4.36), we obtain an algebraic equation which when split gives six system of equation which when solved, we secure solutions presented as
where . Therefore the general solution of (1.4) with regards to the constant values in (4.68) and (4.69) are respectively expressed as
where . Figs. 22 and 23 respectively reveals the streaming pattern of solutions (4.70) and (4.71) using diverse values of the involved parameters.
4.2.2. Snoidal wave solutions
Case. A. When n=1,
We consider the NODE (3.22), for case of n=1 and as earlier shown the balancing term and then the assumed solution (4.35) is
Replacing the value of from (4.72) into (3.22) and utilizing (4.37), we get eight system of equations which give the solutions that are
with , , . Thus, we express general solutions of (1.4) in reference to (4.73)-(4.75) as
where and . The three solutions (4.76), (4.77) and (4.78) are represented graphically with the use of the dissimilar values of the parameters utilized in Figs. 24, 25 and 26 accordingly.
Case B. When n=2
In this case as previously revealed and so (4.35) becomes
Invoking the value of stated in (4.79) into (3.22) in consonance with (4.37), we achieve an algebraic equation which when split yields the system whose solution can be presented as
Consequently, we have the corresponding general solution with regards to (4.80)-(4.82) respectively as
where and . We showcase the dynamics of solutions (4.83), (4.84) and (4.85) respectively in Figs. 27, 28 and 29 respectively.
4.3. Solutions of (3.31) using extended Jacobi function expansion technique
Next, we generate closed-form solutions of (3.31) in the form of cnoidal and snoidal waves with the aid of extended Jacobi function expansion approach for and .
4.3.1. Cnoidal wave solutions of NODE (3.31)
Considering NODE (3.31), we first contemplate a case of n=1. Thus, as earlier revealed and then (4.35) assumes the structure
We now replace the value of from (4.86) into (3.31) and employ (4.36) to secure thirteen system of equations. Engaging Maple software package in gaining the solution of the thirteen long system of equations, we have the outcome as
with . Hence we have the general solutions related to (4.87)-(4.90) respectively as
with and . Engaging the unalike values of the parameters included in the solutions, we display the pictorial representations of solutions (4.91), (4.92), (4.93), and (4.94), in Figs. 30, 31, 32 and 33 accordingly.
Case B. When n=2
In this case as previously revealed and so (4.35) becomes
Invoking the value of stated in (4.95) into (3.22) in consonance with (4.37), we achieve an algebraic equation which when split yields a system of algebraic equations whose solutions are expressed in terms of constant parameters , , , and as
The general solutions of 3D-gextQZKe (1.4) related to (4.96)-(4.98) are
where and . We exhibit the graphs of solutions (4.99), (4.100) and (4.101) respectively in Figs. 34, 35 and 36.
4.3.2. Snoidal wave solutions
Case. A. When n=1,
Now, we contemplate the NODE (3.31) and secure its snoidal solution for the usual two cases of . Case n=1 as earlier shown possesses the balancing number and then an assumed solution (4.35) becomes
Inserting the value of from (4.102) into (3.31) and utilizing (4.37), we get thirteen system of equations which when solved furnish the solutions
Thus, corresponding general solutions to (4.103)-(4.106) are presented respectively as
with alongside . We give the graphic display of solutions (4.107), (4.108), (4.109) and (4.110) in Figs. 37, 38, 39 and 40 accordingly using the unalike values of the included parameters.
Case B. When n=2
In this case as previously demonstrated and so (4.35) becomes
Invoking the value of given in (4.111) into (3.31) in conjunction with (4.37), we achieve an algebraic equation which when split yields eleven system of equation. In consequence, solving the system furnishes the values of the involved parameters as
The associated general solution to (4.112)-(4.114) are respectively
where as well as . The streaming patterns of solutions (4.115), (4.116), and (4.117) are revealed in Figs. 41, 42, and 43 respectively.
5. Soliton wave dynamics and analysis of solutions
Physical interpretations of various solitary wave solutions secured in this study are presented in this section in order to reveal their physical meaning. Thus, we depict these solutions via 3-D plot, 2-D plot as well as density plots. In order to exhibit the most advantageous representation of the graph, we make appropriate arbitrary choice of constants. The dynamical character of soliton solution (3.21) is portrayed in Fig. 1, using the suitable constant parameters , , , , , , , when at with . In addition, Fig. 2 is plotted with the aid of assigned values , , , , , , , when with the same value of and intervals. Soliton (3.29) is represented in Fig. 3 by invoking the parametric values , , , , , , , with , variables and . Fig. 4 further reveals the streaming behaviour of (3.29) through dissimilar constant values , , , , , , , , when , and . Next, multi-soliton structure in Fig. 5 portrays the soliton solution (3.30) via unalike parameters , , , , , , , , where , with in the interval . Moreover, we plot Fig. 6 to exhibit the solution by assigning suitable constant values , , , , , , , , when , and . The Figure reveals another multi-soliton wave of the solution. The compacton-type soliton wave structure in Fig. 7 is plotted through the numerical simulation of bright soliton (3.33) with parameters , , , , , , , , when , as well as . In the same vein, bell-shaped Fig. 8 further depicts the solution with constant values , , , , , , , , when , and . The combo-type solitons which is an interesting wave structure in physical sciences exhibited in Fig. 9 portrays the singular soliton solution (3.34). This is achieved via the dissimilar constant values , , , , , , , , when with and variables existing in the interval . Besides, the motion of the solution is further simulated numerically yielding Fig. 10 with parameters , , , , , , , , where with variable assuming the same value and , the same range of interval. Next, we examine the dynamics of soliton waves of periodic soliton solution (4.43) in Fig. 11 with values , , , , , , , , where and . Solitary wave solution (4.44) in Fig. 12 with values , , , , , , , , where and variables . In the same vein numerical simulation of soliton (4.48) in Fig. 13 with values , , , , , , , where we have and variables . Moreover, Fig. 14 depict the motion of soliton (4.49) with values , , , , , , , where variables and . The snoidal wave solution (4.53) is represented with Fig. 15 using unalike parameters , , , , , , , , where and . Numerical simulation of solitary wave solution (4.54) is depicted with Fig. 16 by invoking parameters , , , , , , , , where and . Snoidal wave solution (4.58) is portrayed via Fig. 17 using parametric values , , , , , , , where and . Further to that, Fig. 18 represents the dynamics of solution (4.59) through dissimilar parameters , , , , , , , , where and . Fig. 19 portrays the wave motion of cnoidal wave solution (4.64) where the graphs in the Figure are plotted using the constant parameters , , , , , , , with as well as . In the same format, we have solution (4.65) depicted in Fig. 20
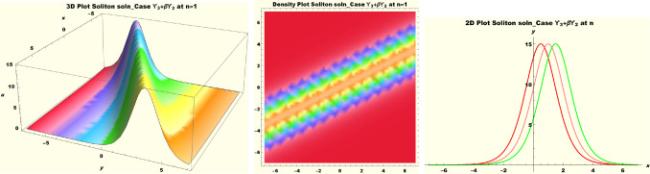
Fig.1 Bright soliton wave profile of (3.21), at for . |
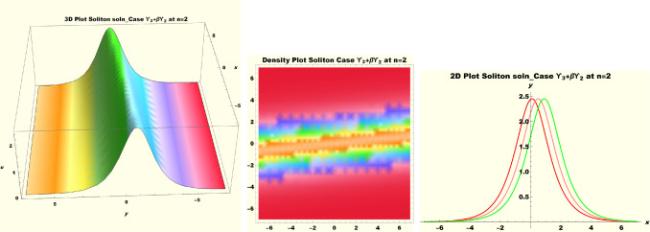
Fig.2 Bright soliton wave profile of (3.21), at for . |
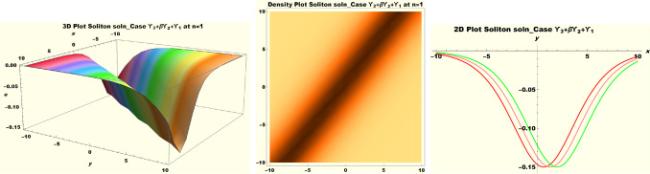
Fig.3 Dark soliton wave profile of (3.29), at for . |
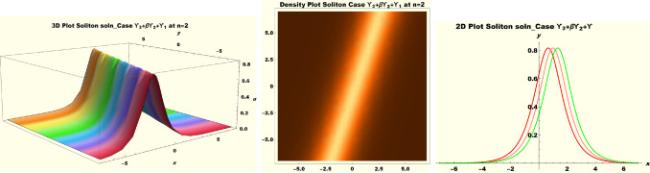
Fig.4 Bright soliton wave profile of (3.29), at for . |
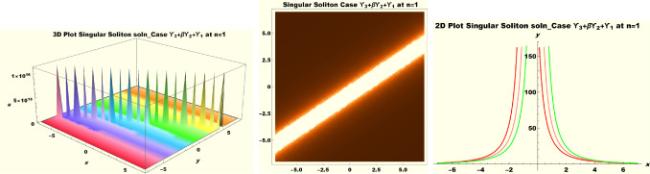
Fig.5 Multi-soliton wave structure of (3.30), at for . |
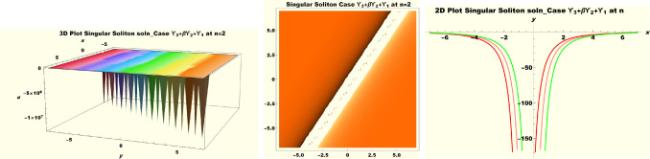
Fig.6 Multi-soliton wave structure of (3.30), at for . |
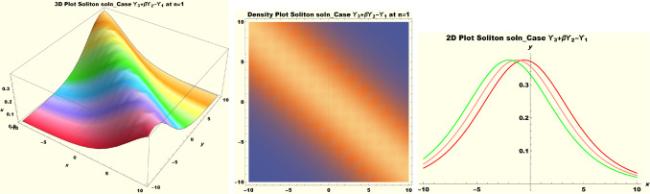
Fig.7 Bright soliton wave profile of (3.33), at for . |
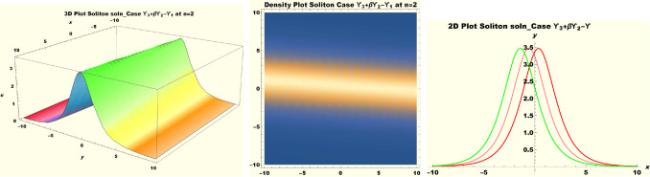
Fig.8 Bright soliton wave profile of (3.33), at for . |
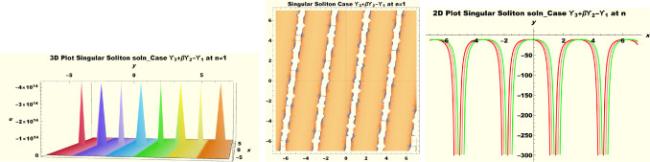
Fig.9 Multi-soliton wave profile of (3.34), at for . |

Fig.10 Multi-soliton wave profile of (3.34), at for . |
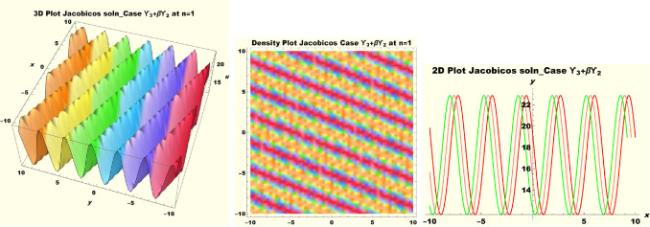
Fig.11 Smooth periodic wave profile of (4.43) with at . |
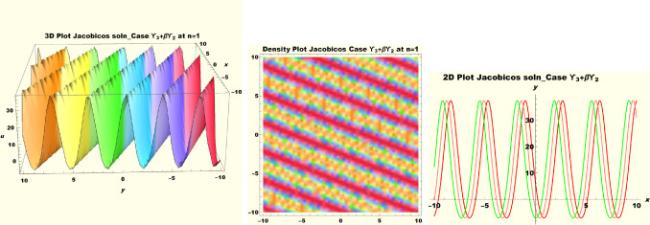
Fig.12 Smooth periodic wave profile of (4.44) with at . |
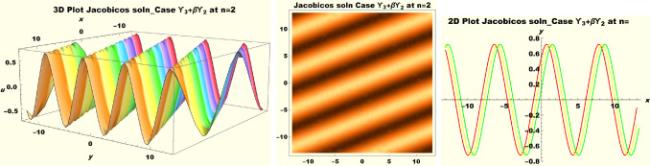
Fig.13 Smooth periodic wave profile of solution (4.48), at . |
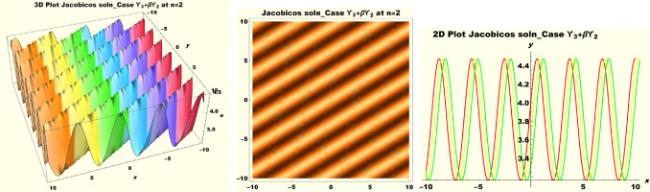
Fig.14 Smooth periodic wave profile of solution (4.49), at . |
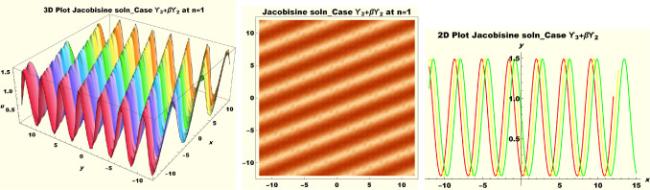
Fig.15 Smooth periodic wave profile of (4.53), at . |
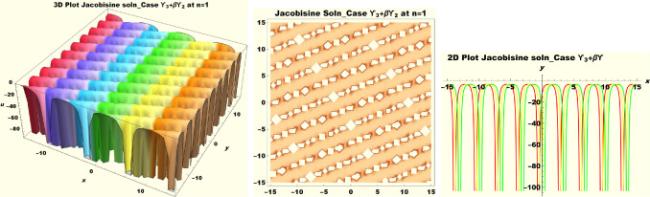
Fig.16 Singular periodic wave profile of (4.54), at . |
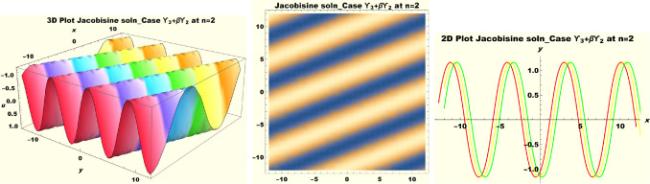
Fig.17 Smooth periodic wave profile of (4.58), at . |
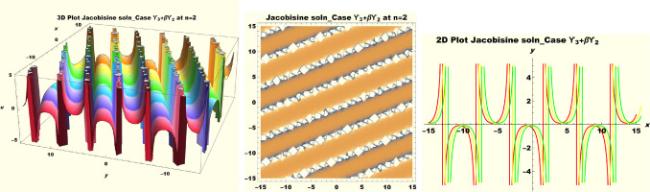
Fig.18 Singular periodic wave profile of (4.59), at . |
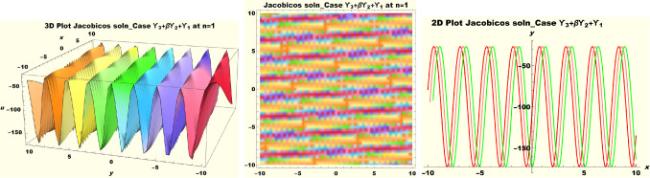
Fig.19 Smooth periodic wave profile of (4.64) with at . |
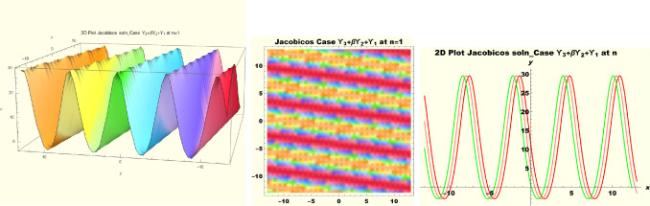
Fig.20 Smooth periodic wave profile of (4.65) with at . |
via the selection of parametric values , , , , , , , with as well as . The numerical simulation of periodic soliton (4.66) occasions the diagrammatic representations in Fig. 21 with unalike constant values , , , , , , , with
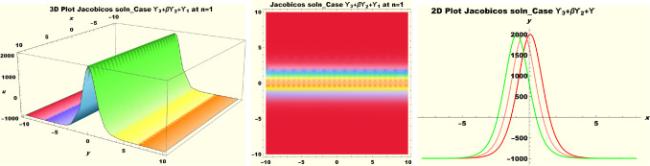
Fig.21 Bell shape wave profile of (4.66) with at . |
whereas on the -plane, . Moreover, the wave portrayal of cnoidal wave solution (4.70) is achieved in Fig. 22 through the use of variant parametric values designated as , , , , , , , where variables and . Fig. 23 reveals the wave motion of bright soliton solution (4.71) by invoking constant values , , , , , , with variables
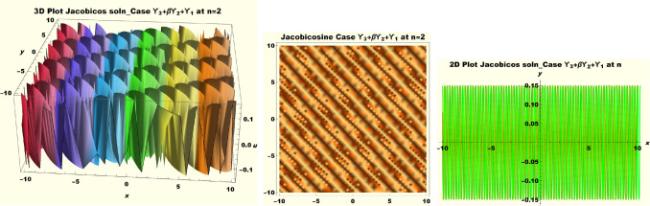
Fig.22 Periodic wave profile of (4.70) with at . |

Fig.23 Bell shape wave profile of (4.71) with at . |
whereas on the -plane, . Next, we examine the wave dynamics of snoidal wave solutions. Thus, solution (4.76) is represented via Fig. 24 with parametric values , , , , , , , with as well as . Besides, we plot solution (4.77) in Fig. 25 by assigning , , , , , , , with alongside . Solution (4.78) is depicted in Fig. 26 through the dissimilar constant values , , , , , , , whereas assumes the same value and , the same range. Periodic soliton (4.83) is plotted in Fig. 27 with , , , , , , with
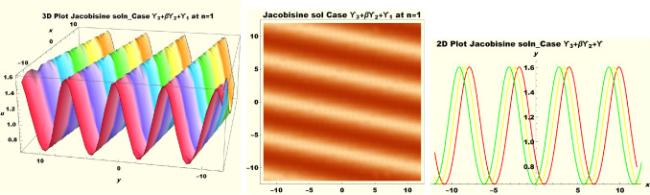
Fig.24 Smooth periodic wave profile of (4.76) with at . |
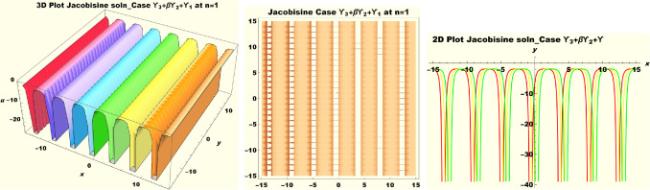
Fig.25 Singular periodic wave profile of (4.77) with at . |
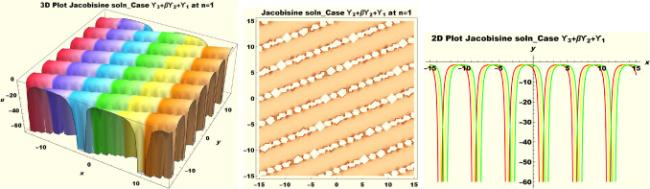
Fig.26 Singular periodic wave profile of (4.78) with at . |
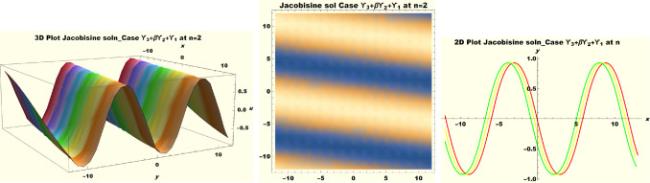
Fig.27 Smooth periodic wave profile of (4.83) with at . |
where
where solution (4.84) is portrayed in Fig. 28 using , , , , , variable and . We reveal the dynamics of snoidal wave solution (4.85) in Fig. 29 through , , , , , , whereas together with . Furthermore, cnoidal wave solution (4.91) is depicted in Fig. 30 via constants , , , , , , , , with alongside . In the same vein, periodic solution (4.91) is plotted in Fig. 31 through variant parametric values , , , , , , , , where we have as well as . In Fig. 32, we represent cnoidal wave (4.91) via constant values , , , , , , , , where and . Besides, solitary wave solution (4.92) is furnished in Fig. 33 using , , , , , , , , with alongside . Solitary wave solution (4.99) is represented in Fig. 34 by utilizing parameters , , , , , whereas together with . In addition to that cnoidal wave (4.100) is exhibited in Fig. 35 by invoking parametric values , , , , , , where alongside . We depict periodic soliton (4.101) in Fig. 36 via the use of , , , , , , whereas and . Furthermore, solitary wave solution (4.107) is purveyed in Fig. 37 with dissimilar constants , , , , , , , , where we have along with . Periodic solution (4.108) is exhibited in Fig. 38 with unalike constants , , , , , , , , with variables together with on the -plane. The snoidal wave (4.109) plotted in Fig. 39 is achieved via choice of constants , , , , , , , , whereas variable alongside .
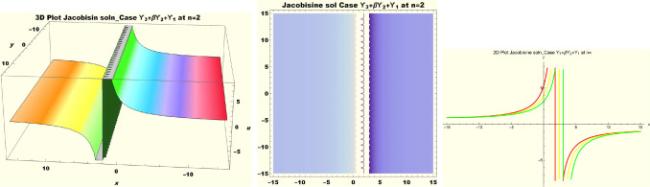
Fig.28 Singular periodic wave profile of (4.84) with at . |
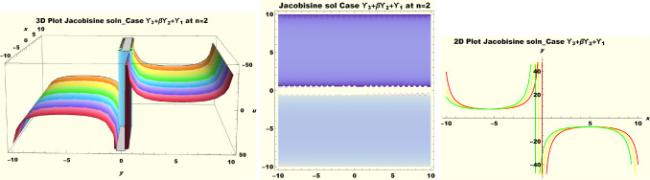
Fig.29 Singular periodic wave profile of (4.85) with at . |
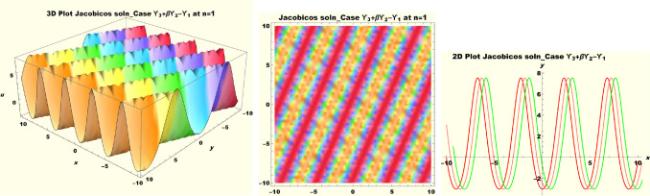
Fig.30 Periodic wave profile of (4.91) with at . |
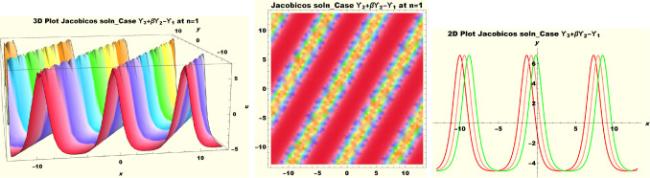
Fig.31 Periodic wave profile of (4.92) with at . |
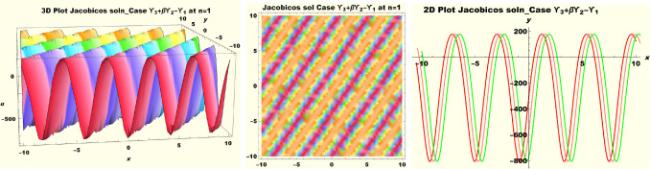
Fig.32 Periodic wave profile of (4.93) with at . |
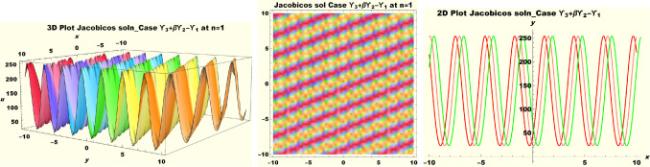
Fig.33 Periodic wave profile of (4.94) with at . |
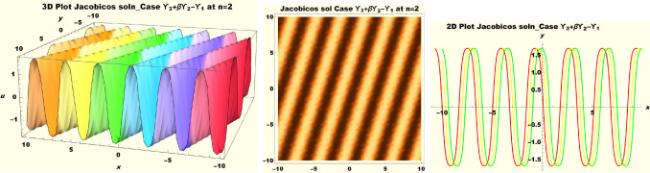
Fig.34 Periodic wave profile of (4.99) with at . |
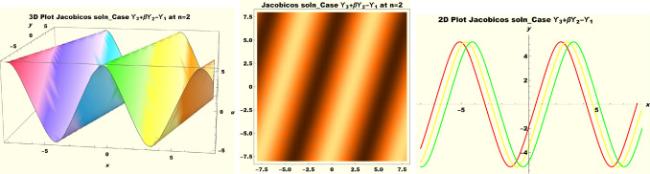
Fig.35 Periodic wave profile of (4.100) with at . |
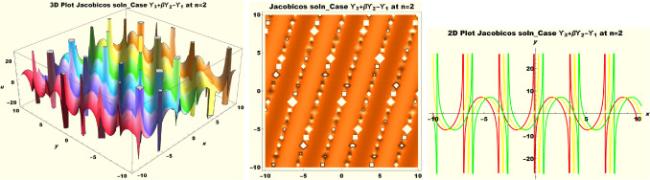
Fig.36 Singular periodic wave profile of (4.101) with at . |
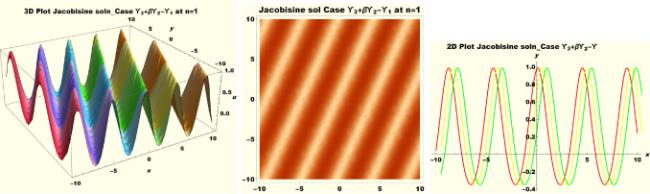
Fig.37 Smooth periodic wave profile of (4.107) with at . |
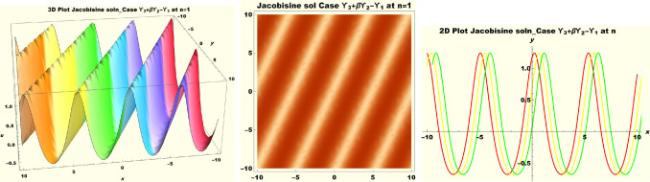
Fig.38 Smooth periodic wave profile of (4.108) with at . |
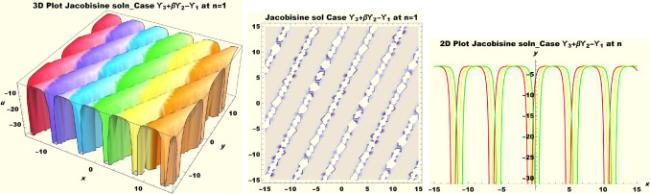
Fig.39 Singular periodic wave profile of (4.109) with at . |
Moreover, dynamics of snoidal wave (4.110) is numerically simulated thereby purveying Fig. 40 by engaging most beneficial parametric constant values , , , , , , , , whereas we have variable and also . Fig. 41 depicts smooth periodic solution (4.115) using , , , , , , , with variable and on the -plane. In the same vein, smooth snoidal wave (4.116) is portrayed in Fig. 42 with dissimilar constant values , , , , , where and . Finally, we simulate periodic soliton (4.117) numerically via , , , , , , where we assign variable and on the -plane.
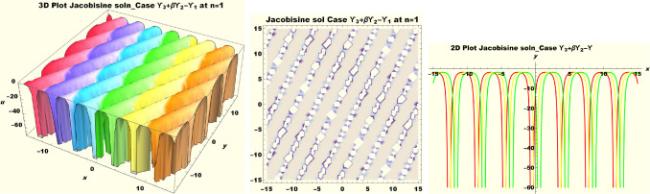
Fig.40 Singular periodic wave profile of (4.110) with at . |
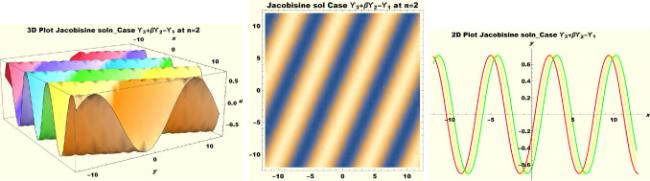
Fig.41 Smooth periodic wave profile of (4.115) with at . |
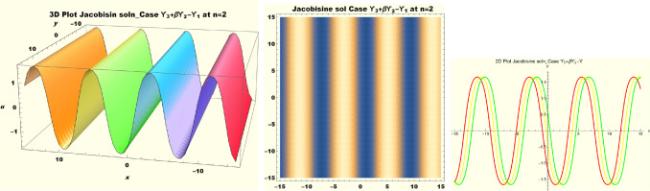
Fig.42 Smooth periodic wave profile of (4.116) with at . |

Fig.43 Singular periodic wave profile of (4.117) with at . |
6. Applications of cnoidal and snoidal waves in ocean engineering and oceanography
In this study, we are aware that various solutions attained comprise copious cnoidal and snoidal waves which are solitary waves or periodic solitons. Cnoidal waves can be presented as an infinite sum of periodically repeated solitary waves. These waves have been comprehensively demonstrated through numerical simulations of the solutions using computer software by making adequate choices of parameters.
A solitary wave [7], [65], [66], [67] is the kind of wave propagating in the absence of any temporal evolution with regards to shape or size when it is viewed concerning the reference frame travelling with the group velocity existing in the wave. Furthermore, the envelope of the wave is possessive of one global peak whose decays occur far away from the peak. It is observed that solitary waves surface in various contexts that are inclusive of the elevation of the surface of the water as well as the intensity of light which is resident in optical fibres. In addition, a soliton is a nonlinear type of solitary wave which is possessive of an additional characteristic that the wave, after interacting with another soliton still conserves its permanent structure. For instance, in two solitons generating in the directions opposite to each other, successfully move through each other as it were without any breakage [68]. (See Figs. 44-45).
Solitons constitute a remarkable group of solutions related to some model equations. These equations comprise the Korteweg de-Vries as well as the Nonlinear Schrödinger equations. These equations are approximations, that are true under a confining set of criteria. The soliton results achieved from the model equation give us some understanding of the dynamical behaviour of solitary waves. Nevertheless, they are restrained by the criteria under which the model equations operate. A surrogate approach, relating directly to the precise equations where the model equations are constructed, gives an awareness of a larger class of solitary waves than those which are achieved via the model equations. Information with regards to the possible existence of a certain class of solitary waves can be achieved via a phase-plane formalism which is a common technique engaged in dynamical systems. Thus, a solitary wave, in this framework, corresponds to a homoclinic orbit that is existing in a spatial dynamical system. In addition, the occurrence of solitary waves is discovered in many diverse cases, which are determined, by their level of decay concerning the distance from their global peak. In consequence, a keen investigation of the tail regions, relative to their distance from the global peak, reveals that four possible cases of solitary waves can be achieved. Three of these cases include; the one secured via the steady-state solution of the Korteweg de-Vries equation. Secondly, a generalized solitary wave decays to non-zero oscillations with uniform amplitude as well as wave number. Thirdly, an envelope solitary wave, which fulfils the Nonlinear Schrödinger equation[68].
Moreover, solitary waves can be contemplated as a class of nonlinear, nonsinusoidal, more-or-less isolated waves which have complex shapes frequently occurring in nature. Internal waves are waves existing and also travelling within the interior of a given fluid. Such waves are very common as oscillations and they are visible in a two-layer fluid contained in a clear plastic box. The coherence of these waves is sustained. In the same vein, the visibility of the waves is conserved via nonlinear hydrodynamics that surface in imagery, as long quasilinear stripes. Besides, the signatures of internal waves are made conspicuous through current or wave interactions. In such a case, the related near-surface current to the internal wave modulates locally with regard to the height of the surface wave spectrum[71]. (See Fig. 45).
Ocean engineering is comprehensively defined as an area of technological investigation relating to the design alongside operations of man-made systems that is existing in the ocean as well as other marine bodies. In fact, it makes provision for essential interconnections that is existing among other disciplines of oceanography which consist of chemical together with physical oceanography, marine biology as well as marine geology and geophysics. The innovations in the instrumentation along with equipment design effectuated by ocean engineers have restructured the field of oceanography. In the same vein, the oceanographers' central point has been to drive the demand for design skills in conjunction with the technical expertise of ocean engineers. Moreover, unswervingly, ocean engineering incorporates diverse other areas of engineering which comprise a merge of mechanical, electrical, acoustical, chemical alongside civil engineering skills as well as techniques in consonance with a basic understanding of the way oceans operate (see the schematic diagram in Fig. 47). In addition to designing the building instruments that must outlive the wear and tear of persistent use, ocean engineers must also design instruments that can come through the harsh realities surrounding the ocean environment.
Hazardous events, which include rock falls or avalanches, rock slides, and landslides, frequently generate great, impulsive waves when they enter or are submerged in water bodies [73]. Therefore, these waves are then approximated through the use of solitary waves whose overwhelming potential damage with regard to the built environment has been investigated by researchers. In order to further deepen the understanding of solitary waves which run up a constant beach slope and also propagate over a subsequent horizontal plane can assist in minimizing as well as attenuating damage and the number of casualties that can be caused as a result of the damning effect of such a hazardous event [74]. The interaction exiting between structures alongside waves is a typical phenomenon in naval architecture as well as ocean engineering. Consequently, we present some relevance of solitary waves in oceanography and ocean engineering .
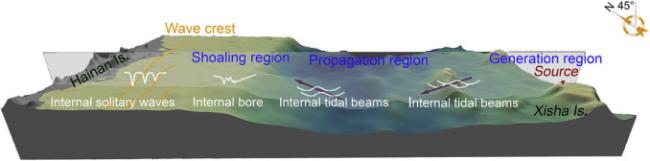
Oceanographers and acousticians have realized that shallow water internal solitary waves are a major topic of interest . The investigation into internal solitary waves found in ocean acoustic was motivated by the discovery of an anomalous frequency response of sound propagation measurements which was noticed in shallow water (see Fig. 46). The spatial, as well as temporal scales of internal bores and solitary waves that are induced by tides, are the type that can significantly affect the acoustic field via the structure of sound speed. The interaction between the acoustical field and the solitary wave train at certain frequencies can be quite significant. Various interactions that existed between the acoustical field, as well as the solitary wave train, can also emerge between the receiver and source. In [75], the scientist conducted theoretical research into the coupling of acoustical normal modes where the presence of solitary-wave-type disturbances was observed. They discovered that strong lateral gradients of sound speed in the waves occasioned the transfer of energy between various acoustical modes. The phase mode within the solitary wave packet differs with time scales of minutes. This eventually causes coupling and signal fluctuations at comparable time scales. Furthermore, right from the studies conducted by Zhou et al. [76], oceanographic alongside littoral acoustical experiments have been conducted on the synoptic as well as local scales, where the experiment fronts reveal that there was a prevalence of eddies, tidal effects, internal waves, mesoscale variability together with solitary waves. Surveys have also been conducted on the New England and New Jersey continental shelves[77].
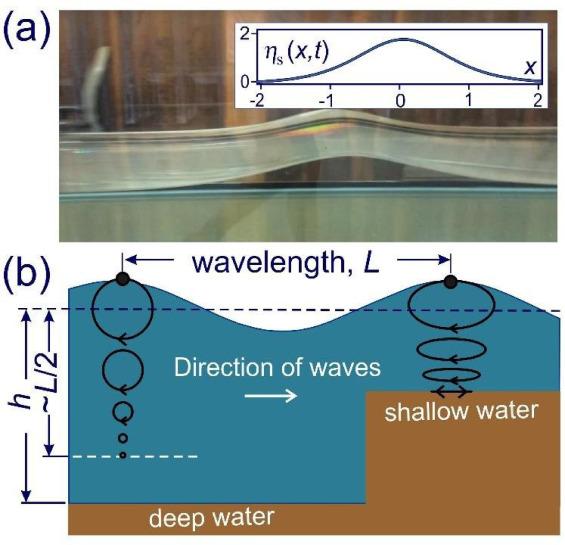
Fig.46 Russell's solitary-wave solitons occur in shallow water channels, (a) as shown in a laboratory reconstruction of Russell's original observation. The inset is a typical localized solution of the Korteweg-de Vries equation for extremely shallow water. (b) In deep water, waves propagate (from left to right), whereas water particles orbit in circles around their average position. The diameter of the circular orbits shrinks gradually with increasing distance from the surface down to half the wavelength . In shallow waters with depth , the orbits become elliptical and essentially flat at the bottom of the tank or seabed [72]. |

Fig.47 A simplified concept of the main wave transformation and attenuation processes which must be considered by coastal engineers in designing coastal defence schemes [78]. |
7. Conservation laws of 3D-gextQZKe (1.4)
In this section we construct the conservation laws for the 3D-gextQZKe (1.4). We achieve that by using Noether's theorem.
7.1. Construction of conservation laws using the Noether theorem
This subsection begins with the employment of the well-celebrated Noether theorem [79] to derive the conservation laws of the 3D-gextQZKe (1.4). Here we discovered that (1.4) does not admit any Lagrangian in its current state and as such possesses no variational principle. Notwithstanding, to circumvent that we engage the transformation and interestingly, we secure a fourth-order form of Eq. (1.4) structured as
which readily has a Lagrangian. Hence, we present a Lemma to that effect.
Lemma 7.1. The 3D-gextQZKe (1.4) manifests the Euler-Lagrange equation having the functional
where the conforming function of Lagrange is expressed as
One can readily proof that the second-order Lagrangian for the fourth-order PDE (7.118) which is given in (7.120) satisfies the Euler-Lagrangian equation as envisaged, by utilizing the standard Euler operator expressed as
where total derivatives , and can be calculated from (2.10). In a bid to secure the variational symmetries which is correspondent to the stated Lagrangian (7.120), we shall utilize the invariance condition
where second prolongation is defined as
We notice that coefficient functions , , , as well as gauge functions , and are depending on . To determine the Noether symmetry generators , we expand invariance condition (7.121) and separate the monomials and that furnishes the sixty-four system of linear PDEs, which are
From the system of PDEs, we secure the values of the coefficient functions as
Functions and are set to zero due to the reason that they contribute to the trivial part of the conserved vectors. Thus, the coefficient functions yields the six Noether symmetries alongside their respective gauge functions, viz.,
associated with Lagrangian (7.120) can be secured from [80]
in such a way that condition , holds. The Noether operator given in (7.123) is expressed as
with and representing the total number of independent and dependent variables respectively. The Euler-Lagrange operators with respect to derivatives of is achieved from
by substituting with the corresponding derivatives. For instance,
Utilizing (7.120), (7.122) and (7.123), we generate local and nonlocal conserved vectors for respective generators , , , , and as
8. Conclusions
In this paper, we carried out a comprehensive investigation on a generalized extended (2+1)-dimensional quantum Zakharov-Kuznetsov equation with power-law nonlinearity (1.4) in oceanography and ocean engineering. The concept of the Lie group theory was engaged in achieving the task. In consequence, four-dimensional Lie algebra associated with (1.4) was gained. Besides, we constructed a 1-D optimal system of Lie subalgebras corresponding to the secured symmetries which were invoked to achieve various classical solutions for Eq. (1.4) through symmetry reductions as well as direct integration approach. Besides, the Jacobi functions expansion approach was engaged in securing general solutions to the underlying equation for some particular cases of . The solutions contain bright, compact-type, dark, singular, non-topological and periodic solitons which represent both the bounded and unbounded solution-type related to the underlying equation. Moreover, to complete the solutions, we depicted the dynamics of the results with suitable graphical representations through numerical simulation using a computer software package. Sequel to that, applications of cnoidal and snoidal waves which were abundantly obtained in the course of the study were outlined in oceanography and ocean engineering fields. Furthermore, we constructed the conservation laws of (1.4) by imploring Noether's theorem of conserved quantities. These conservation laws are expressed in terms of both local and nonlocal conserved vectors. The nonlocal conserved vectors are the first integrals associated with the variational principle secured. In addition, conservations of energy and momentum which are highly applicable in theoretical physics are obtained in the study. In consequence of the aforementioned, the various results gained in this research work could be of interest to scientists in oceanography and theoretical physics as well as ocean and coastal engineers.
8.1. Future scope
Some of the achieved soliton solutions and various other results which include the conserved currents have diverse applications in physical sciences and some other engineering fields including plasma physics, mathematical physics, coastal science and engineering, solitons dynamics, and a wide range of other nonlinear sciences as well as engineering physics. In consequence, in the future, the dynamics of various soliton solutions could contribute to a broad-gauge theory to delineate the experience of the intricated diversity in diverse nonlinear physical systems. In the same vein, due to the fact that the evolutionary character of soliton solutions has invigorated outstanding research alongside development in a vast range of fields, it will be of great interest to examine the potential advantages of interactions that could exist between cnoidal-snoidal waves and that of the dynamical behaviour of mixed solitons (singular and non-singular).
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
The authors declare the following financial interests/personal relationships which may be considered as potential competing interests:
No financial interests/personal relationships which may be considered as potential competing interests.
Acknowledgements
The author would like to thank the editor of the journal as well as the anonymous reviewers for their generous time in providing detailed comments along with suggestions that assisted in improving the paper.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}