中图分类号: U674.3
文献标识码: A
文章编号: 2095-7297(2014)02-0140-06
收稿日期: 2014-05-15
网络出版日期: 2014-03-29
版权声明: 2014 海洋工程装备与技术编辑部 版权所有
作者简介:
门金龙 (1988-),男,硕士,主要从事船舶操纵与控制研究.
展开
摘要
在Matlab/Simulink环境下建立了海洋工程船操作过程的时域模拟平台,以并发的方式与可视化模块集成,可以实现海上作业的虚拟操作.通过对案例船"润江1"舷桥布放过程的操作模拟,获得了定点作业状态下的完整时历数据,对于海洋工程船的安全性评估和过程优化具有重要意义.
关键词:
Abstract
A simulation approach for offshore support vessel (OSV) operation is established in the Matlab/Simulink environment. The time-domain numerical results were concurrently transferred into the visualization package to accomplish the virtual operation and control. The typical gangway deployment of the case vessel "Runjiang 1" in station keeping condition was successfully simulated on this virtual platform. The complete time-domain results are valuable for safety assessment and procedure optimization.
Keywords:
海洋工程船兼具深海资源开发的运载功能和作业功能,往往借助动力定位系统完成恶劣海况下的定点作业,对作业安全性的要求比常规海上运输更加严格[1].为了有效评估海上作业的安全性,海洋工程界已在近期开始借助时域模拟技术完成特定海况下的作业过程分析,并通过操作流程的优化进一步提高海上作业效率[2].
对于舷桥布放等典型的海上作业任务,即使动力定位系统成功保持了船舶位置和航向的稳定性,船体在风浪中的剧烈运动仍会严重影响作业过程的安全性.因此,对海洋工程船的作业过程分析往往需要同时考虑船体操纵控制和六自由度运动的耦合效应.此外,舷桥的操作一般采用手动控制系统,因而对舷桥布放过程的模拟必须借助完整作业场景的可视化以实现虚拟操作.
针对上述应用背景,本文以海洋科考船"润江1"作为案例船,在Matlab/Simulink平台上实现了动力定位控制和六自由度(6DOF)运动的耦合时域计算,并以动态链接库的方式与视景仿真软件Vega Prime集成,完成了特定海况下的舷桥布放虚拟操作,获得了舷桥布放过程的完整时历记录.上述虚拟操作平台为海洋工程船的作业安全性分析和操作流程优化提供了有效的技术手段,具有重要的工程应用价值.
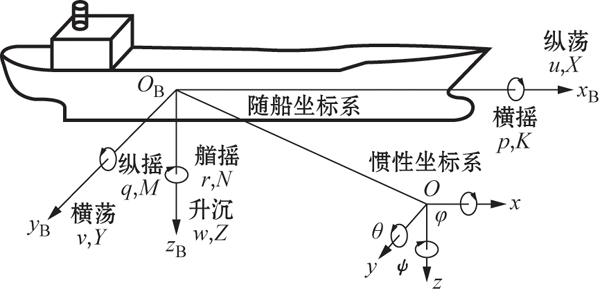
船舶六自由度动力学模型的建立涉及如图1所示的两组坐标系,其中船体位置信息η=[x,y,z,φ,θ,ψ]T在惯性坐标系中表达,而船体速度信息v=[u,v,w,p,q,r]T在随船坐标系中表达,两者可以互相转换.
Fossen等[3]依据Cummins理论将定点状态下的动力学方程改写成如下的时域形式:
式中:mik为船舶刚体质量;a为附加质量矩阵;c为恢复力系数矩阵;
上述动力学方程中的未知量vk代表船体速度矢量v=[u,v,w,p,q,r]T中的各个分量.
为了便于实时仿真与控制器设计,Kristiansen等[4]将卷积项通过状态方程进行替换,获得如下的线性状态空间方程:
μik=Crikξik+Drikvk. (2)
将式(2)代入式(1),可以得到将动力定位控制和六自由度耦合的完整动力学模型:
μik=Crikξik+Drikvk, (3)
式中:Ar,Br,Cr,Dr为卷积项中迟滞函数辨识得到的状态空间参数,可由频域计算结果辨识确定.
本次研究采用频域下的最小二乘拟合方法[5]实现卷积项的替代,其中频域数据采用SESAM软件的计算结果.上述模型中的风浪流环境载荷
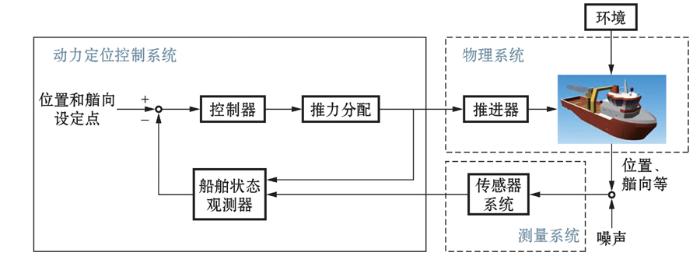
动力定位控制模型的框架如图2所示,由状态观测器,控制器和推力分配三个模块构成.
航行中船舶所受风,流,浪等环境干扰力具有低频和高频两种成分,控制器仅针对低频运动进行操纵控制,以避免过大的机械磨损和能源消耗.为此利用状态观测器从实测船舶运动信号中分离出低频运动信号以及非测量信号的实时估测值用以控制反馈.
本系统中的状态观测器采用卡尔曼滤波算法,控制器采用常规的比例-积分-微分(PID)控制算法,推力分配简化为非凸非线性的最优化问题,算法细节参见文献[3-7].
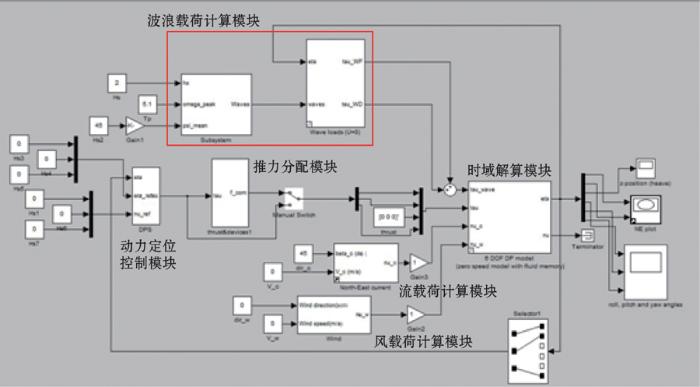
在Matlab/Simulink的环境下建立动力定位控制模型并实时解算完整动力学模型[即式(3)],可以得到海上作业过程的时域仿真结果.Matlab/Simulink仿真框架如图3所示,其中主要包括波浪载荷的计算模块,风载荷计算模块,流载荷计算模块,动力定位控制模块,推力分配模块和时域解算模块.
图3 Matlab/Simulink时域仿真框架
Fig.3 Time-domain simulation framework in Matlab/Simulink
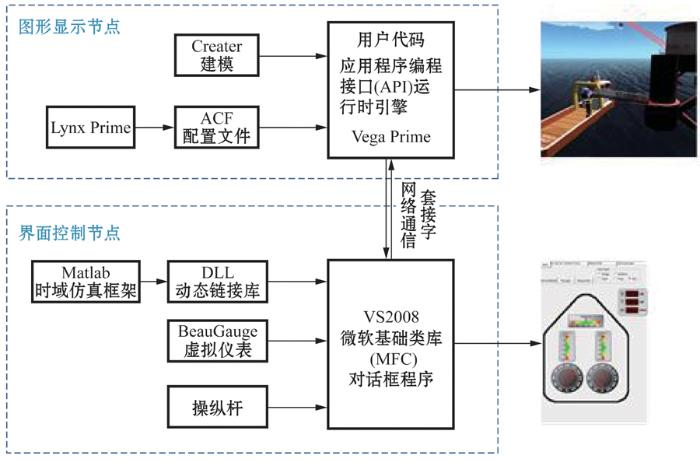
将时域模拟结果与视景仿真软件Vega Prime结合,可以建立如图4所示的实时可视化平台,由界面控制节点和图形显示节点两个模块构成.操作控制数据通过虚拟仪表和外部操纵杆实时输入,船舶运动和位置数据通过动态链接库(DLL)从Matlab/Simulink平台输出,在图形显示节点内完成作业场景的实时渲染.
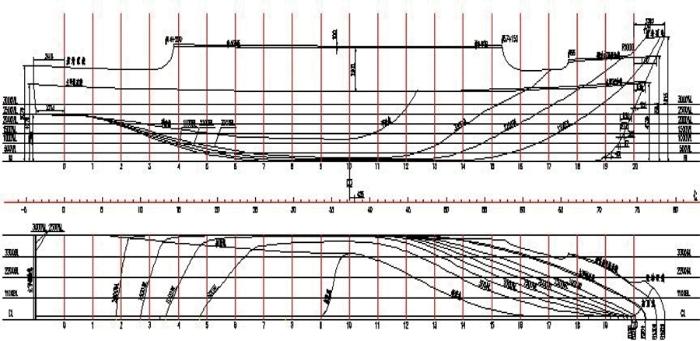
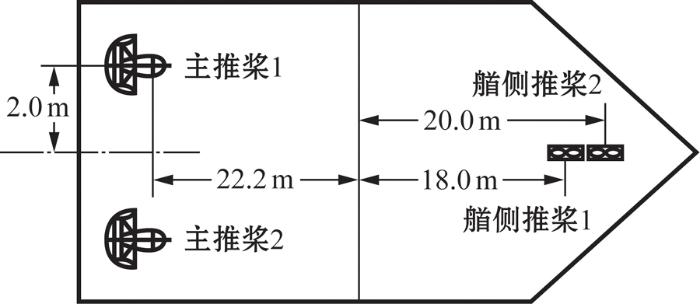
"润江1"科考船的船体主要参数和舷桥作业参数分列在表1和表2中,船体型线如图5所示,两个艏侧推和两个全回转桨的分布位置如图6所示.
表1 "润江1"主要参数
Table 1 Main parameters of "Runjiang 1"
| 参数 | 取值 |
|---|---|
| 垂线间长/m | 44.75 |
| 水线长/m | 47.0 |
| 型宽/m | 8.8 |
| 型深/m | 3.70 |
| 吃水/m | 2.80 |
| 排水量/m3 | 636 |
| 风载荷纵向船体投影面积/m2 | 54.9 |
| 风载荷横向船体投影面积/m2 | 175.4 |
| 流载荷纵向投影面积/m2 | 22.2 |
| 流载荷横向投影面积/m2 | 102.8 |
| 船尾主推最大推力/kN | 44.3 |
| 艏侧推最大推力/kN | 20 |
表2 舷桥作业参数
Table 2 Main parameters of gangway
| 参数 | 取值 |
|---|---|
| 舷桥长度/m | 15 |
| 伸缩长度/m | ±4 |
| 走道宽度/m | 1.2 |
| 操作角度/(°) | -15~+20 |
| 海况 | BF6 |
| 风速/(m·s-1) | 12.8 |
| 有义波高/m | 4.1 |
| 谱峰周期/s | 9.8 |
| 流速/kn | 1 |
| 环境力方向/(°) | 150 |
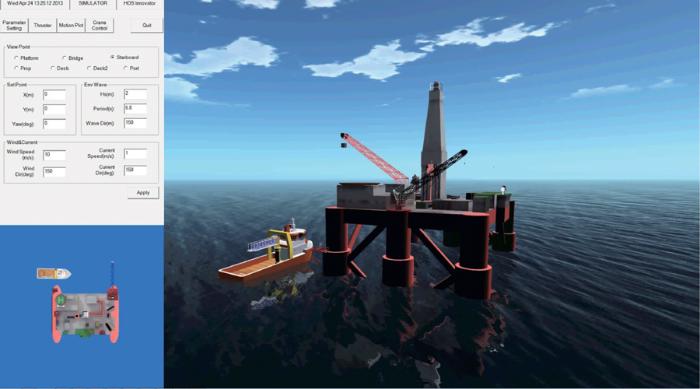
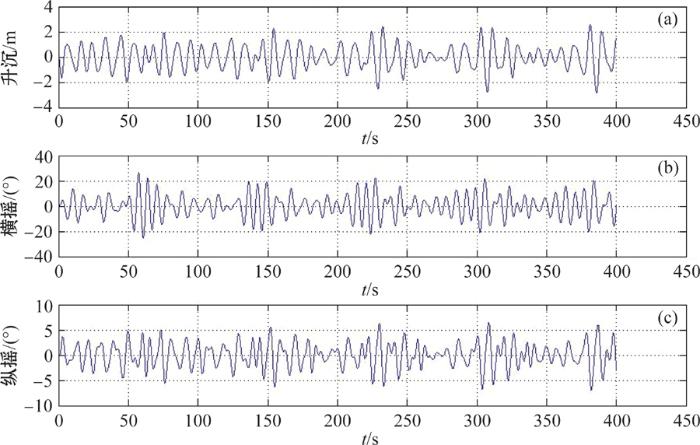
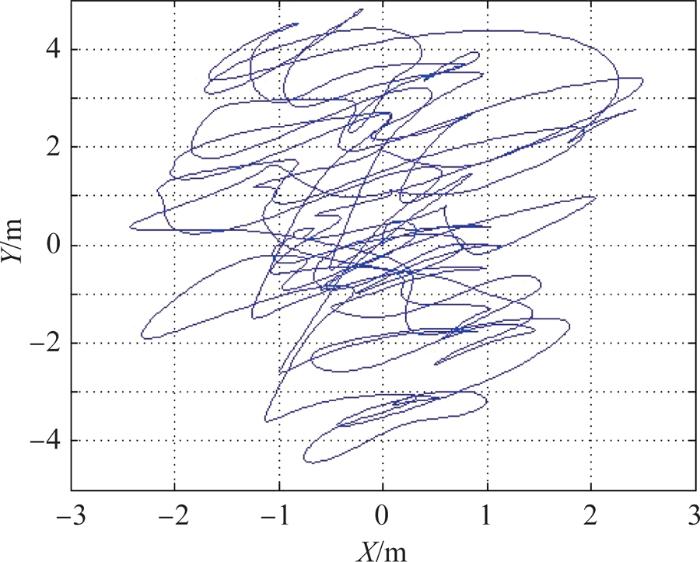
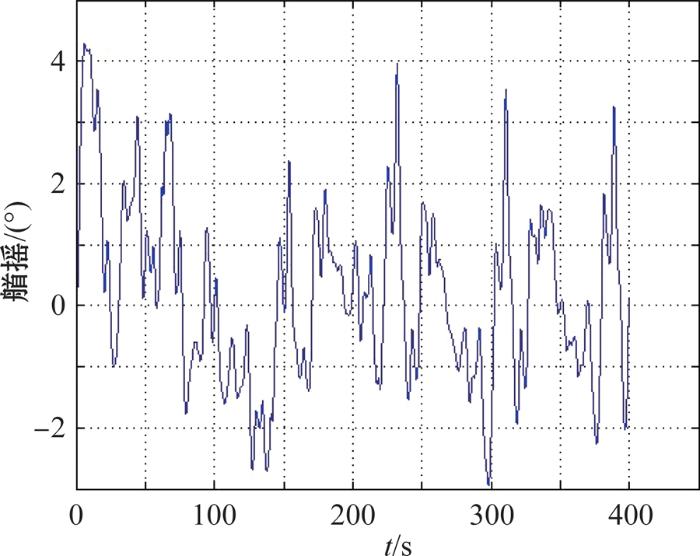
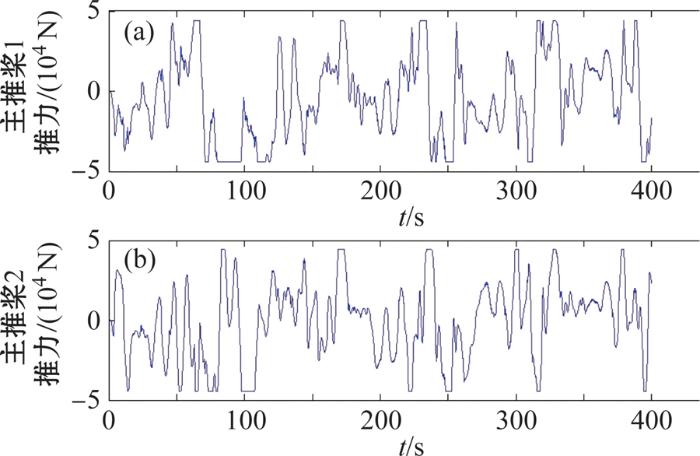
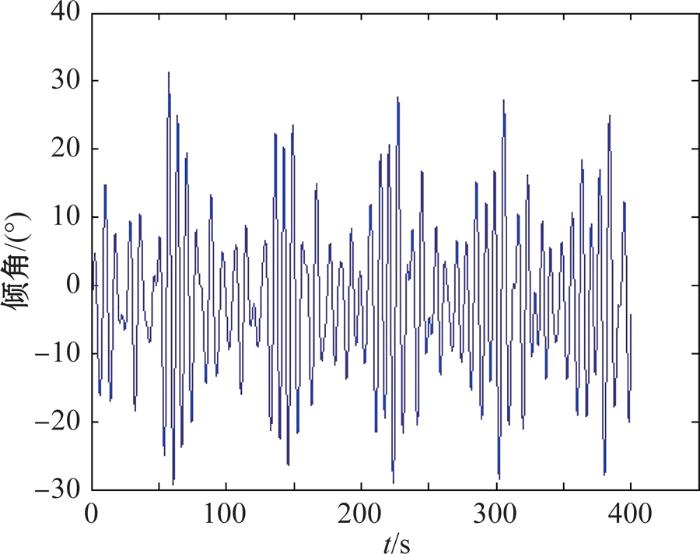
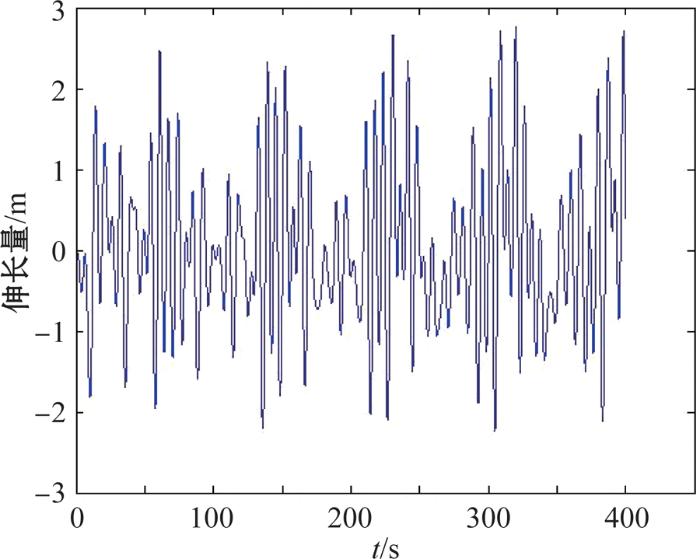
对"润江1"在BF6海况下的舷桥布放作业过程进行了时长400 s的操作模拟,虚拟操作界面如图7所示.模拟获得的船舶运动时历数据分别绘于图8~10中,各推进器推力时历数据分别绘于图11,图12中,舷桥倾角与伸长量时历曲线分别绘于图13,图14中.
本文建立了海洋工程船定点作业过程的时域仿真框架,通过与可视化框架并发处理,生成了可以对海上定点作业能力和操作安全性进行定量评估的虚拟操作平台.通过对"润江1"舷桥布放作业的过程模拟,可以得到下列结论:
(1) 在BF6海况下,"润江1"定位误差保持在5 m之内,艏向误差保持在单幅值4°之内,但尾部主推和艏部侧推均有达到推力上限的情况,推力系统已经处于极限工况,存在定位能力隐患.
(2) 在BF6海况下,舷桥倾角在-30°~+30°之间剧烈变化,已经超过-15°~+20°的舷桥机械限制条件,存在较大的安全隐患.
(3) 本文所建立的虚拟操作平台能够对船舶定点作业能力提供有效的评估,并可为操作流程优化提供定量分析手段,对于提高海洋工程船的定点作业安全性具有重要意义.
The authors have declared that no competing interests exist.
| [1] |
Marine control systems: guidance, navigation and control of ships, rigs and underwater vehicles [M]. |
| [2] |
Experimental validation of dynamic stationkeeping capability analysis: the next level DP capability analysis [D]. |
| [3] |
Nonlinear time-domain strip theory formulation for low-speed manoeuvering and station-keeping [J]. |
| [4] |
Frequency dependent added mass in models for controller design for wave motion ship damping [C]. |
| [5] |
Hybrid frequency-time domain models for dynamic response analysis of marine structures [J]. |
| [6] |
Simulation of low frequency motions of dynamically positioned offshore structures [J].
|
| [7] |
Optimizing nonlinear control allocation [C]. |

/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}