中图分类号: TE137.52
文献标识码: A
文章编号: 2095-7297(2014)03-0230-04
收稿日期: 2014-08-14
网络出版日期: 2014-09-20
版权声明: 2014 海洋工程装备与技术编辑部 版权所有
基金资助:
作者简介:
作者简介:赵宏林(1962--),男,教授,主要从事先进制造技术及石油装备方面的研究.
展开
摘要
深水闸阀执行机构是控制深水闸阀开关状态的动力部件.一般采用液压控制的方式控制阀门开关.针对深水阀门执行机构特有的工况和结构特点,建立了包含导流孔阻尼影响在内的深水闸阀执行机构液压控制时的动力学模型,并且采用SimulationX软件进行了动态仿真.通过分析和比较仿真结果,验证了仿真的可行性,为研究深水闸阀执行机构的动态特性及其优化设计提供了参考依据.
关键词:
Abstract
Deepwater gate valve actuator is the power component to control the switch of deepwater gate valve via a hydraulic way. On account of special working conditions and the structure characteristics of the deepwater gate valve actuator, the dynamical model of the deepwater gate valve actuator under the hydraulic control is established considering the damping effects of the flow guide hole, and the SimulationX software is used for dynamic simulation. By analyzing and comparing the simulation results, the feasibility of the simulation is verified. The results can provide reference for the optimization design and dynamic characteristics research of the deepwater gate valve actuator.
Keywords:
深水闸阀执行机构即用于控制深水闸阀开启和关闭的驱动装置,广泛应用于水下生产系统中[1],如水下采油树,水下管汇等,是海洋深水油气田开发必不可少的设备.与陆上闸阀执行机构相比,需要考虑海水腐蚀,高静水压,深水操作等因素[2],并且要求具有高可靠性和较长的使用寿命,因此其结构也更加复杂.针对深水闸阀执行机构特有的结构和工况特点,对深水闸阀执行机构进行了液压控制时的动态仿真和分析.这对研究深水闸阀执行机构的响应速度和动态特性具有重要意义,也能为执行机构的优化设计提供参考依据.
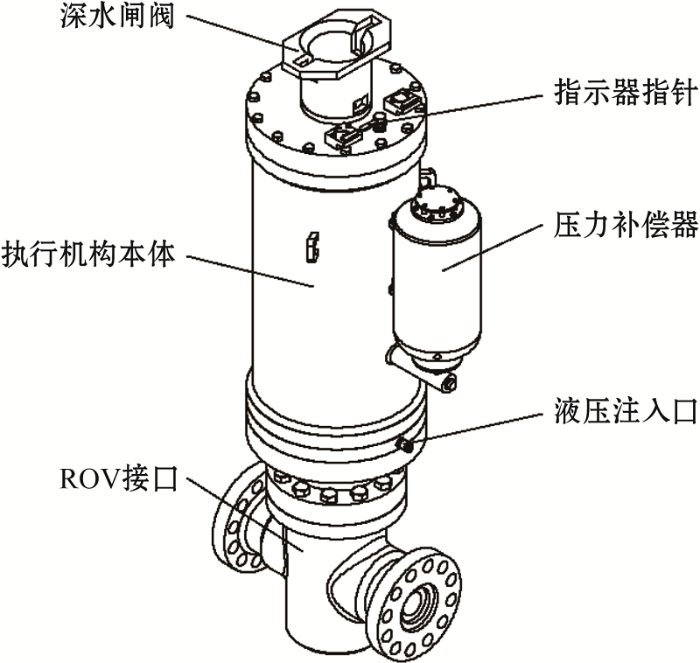
如图1所示,深水闸阀执行机构一般具有单作用液压缸,水下机器人(ROV)操作的接口,接头及其传动机构,供ROV操作时观察的位移指示器,以及用以平衡海水静压的压力补偿器等结构[3].相比陆上闸阀执行机构,深水闸阀执行机构的压力补偿器是其特有的结构部件.
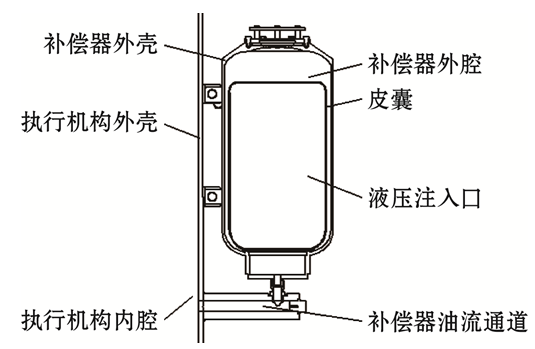
深水闸阀执行机构内部一般充满补偿液,以平衡深海环境下的海水外压.其压力补偿机制通过压力补偿器来实现[3].图2为一种皮囊式压力补偿器,皮囊的内外表面分别与补偿液和海水接触,以达到内外介质的压力平衡,同时又将海水与补偿液隔离,避免海水进入执行机构腐蚀内部部件.
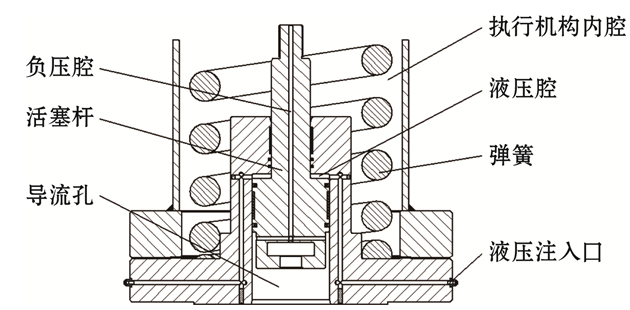
深水闸阀执行机构一般具有执行机构内腔和液压缸负压腔,其内部均充满补偿液,在活塞杆中间开导流孔将负压腔和弹簧腔连通,既可以利用一个压力补偿器来实现压力补偿,又能利用皮囊容积的可变性在液压缸动作时实现负压腔容积变化的补偿.图3为一种深水闸阀执行机构的活塞杆开导流孔示意图.
在液压缸动作时,执行机构负压腔内的补偿液通过导流孔进出执行机构内腔,将产生阻碍活塞杆运动的阻力,其大小与活塞杆运动速度和导流孔设计尺寸密切相关.本文建立了包含导流孔阻尼影响在内的深水闸阀执行机构液压控制时的动力学模型,并且利用SimulationX软件进行了动态仿真.
图3 深水闸阀执行机构活塞杆开导流孔示意图
Fig.3 Diagram of the flow channel hole on the piston rod of deepwater valve actuator
力学模型
执行机构在液压控制开启时,由外部液压源恒压供油;在液压控制关闭时,卸压压力与深水静压平衡.用传递函数法建立深水闸阀执行机构液压控制时的动力学模型[4].
执行器的动态微分方程如下.
执行器开启过程中,活塞杆的力平衡方程:
p(A-A1)+ρgHA1=m
流量方程:
Q=(A-A1)
动作持续时间:
t=(A-A1)
执行器关闭过程中,活塞杆的力平衡方程:
k(L0+y)+(ρgH-
流量方程:
Q1=-(A-A1)
动作持续时间:
t=(A-A1)
式(1)~(6)中:p为执行机构控制开启的供压压力;A为活塞面积;A1为活塞杆面积;A2为阀杆面积;H为工作水深;y为活塞位置;L为活塞行程;L0为弹簧预压缩量;m为活塞等动作部件质量+1/3弹簧质量;ρ为海水密度;μ为补偿液的动力黏度;k为弹簧刚度;g为重力加速度;lp为导流孔长度;dp为导流孔内径;fo为阀门的开启阻力;fc为阀门的关闭阻力;Q为执行机构开启过程中流入液压缸的流量;Q1为执行机构关闭过程中流出液压缸的流量.
SimulationX是一款在统一的平台上实现多学科领域系统工程建模和仿真的软件,包括机械,液压,气动,热,电和磁等物理领域,可用于机电系统设计,机器人及控制系统优化,发动机/车辆冷却系统以及电磁驱动机构的设计等.根据不同行业的特点,用户可利用SimulationX软件的Type Designer工具自定义标准元件,对元件库的标准元件进行扩展,对已有模型进行封装以及对所建模型加密.同时,自定义的内容还具有良好的开放性,继承性和保密性[5-7].
某深水闸阀执行机构位于水下1 500 m;液压控制开启压力为20.7 MPa;执行机构的液压缸内径为180 mm;活塞杆直径为90 mm;阀杆直径为50 mm;活塞杆导流孔直径为10 mm;活塞杆导流孔长度为480 mm,行程120 mm;弹簧刚度221.7 kN/m;活塞杆及其从动部件质量1.245 t;弹簧预压缩量295 mm;闸阀的最大开启阻力为59.6 kN,最大关闭阻力为29.8 kN.
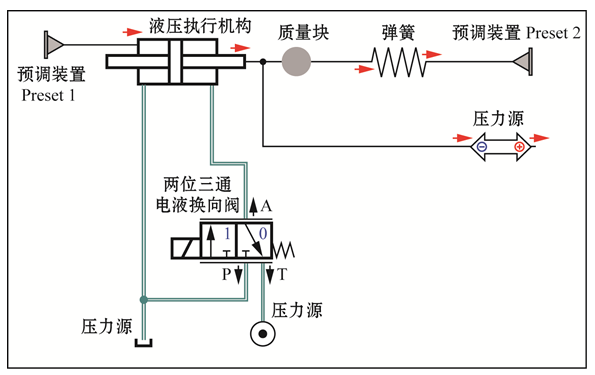
采用SimulationX软件对执行机构的开启和关闭过程进行动态仿真.在SimulationX软件中建立仿真模型,如图4所示.
图4 在SimulationX中建立的执行机构液压控制仿真模型
Fig.4 Simulation model for the actuator hydraulic control established in SimulationX
在图4中,预调装置在仿真中起固定作用,Preset1固定执行机构缸体,Preset2的闸阀执行机构弹簧固定在执行机构内壁的设置;液压执行机构用于闸阀执行机构的闸杆及液压腔腔体设置;质量块用于闸杆质量的设置.弹簧用于闸阀执行机构弹簧参数设置.
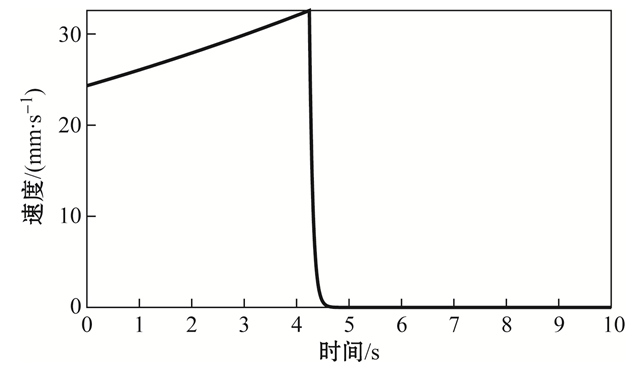
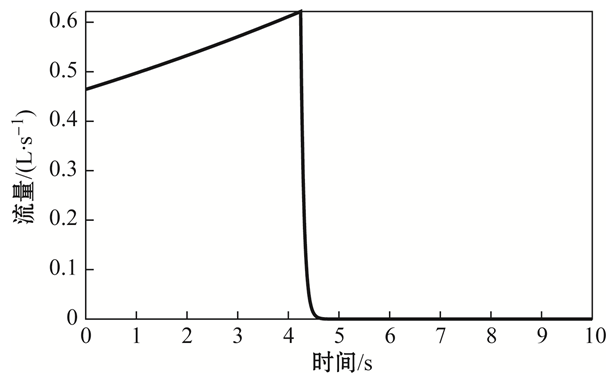
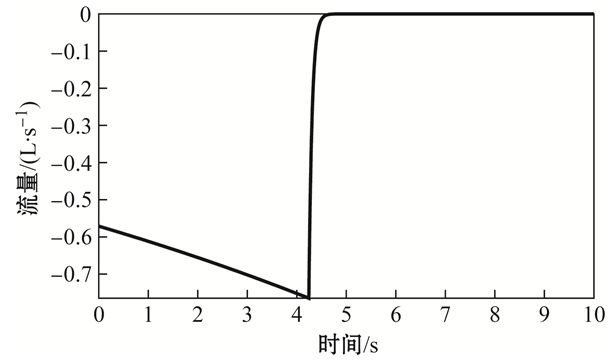
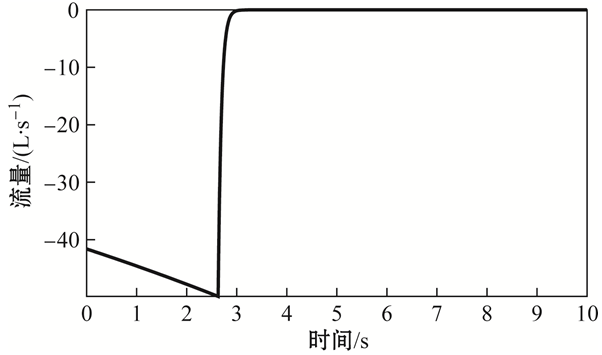
仿真结果如图5~10所示.图中的曲线清晰地表明了执行机构开启和关闭过程中活塞的速度,液压腔流量及负压腔流量的变化.从图中可以看出,流量变化与速度变化基本同步,闸阀执行机构动作时间,开启和关闭过程活塞速度主要与液压流量有关.
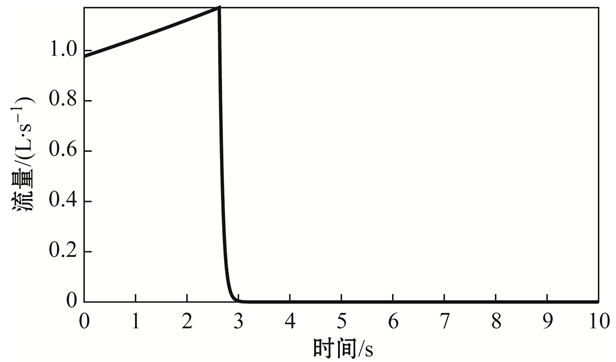
图6 开启时液压腔的流量曲线
Fig.6 Flow curve of the hydraulic cavity in the process of opening
图7 开启时负压腔的流量曲线
Fig.7 Flow curve of the negative pressure cavity in the process of opening
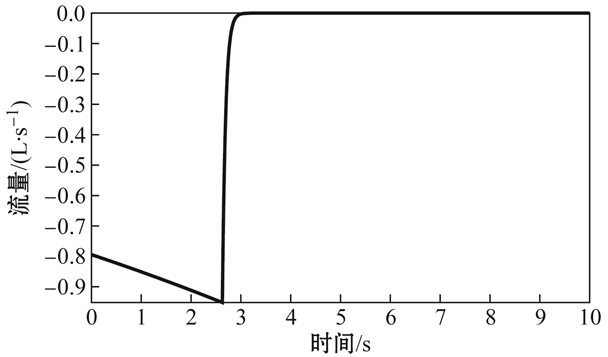
图9 关闭时液压腔的流量曲线
Fig.9 Flow curve of the hydraulic cavity in the process of closing
图10 关闭时负压腔的流量曲线
Fig.10 Flow curve of the negative pressure cavity in the process of closing
由于液压腔和负压腔的活塞杆外径不同,导致其流量在大小上有所差异,所以关闭过程所需时间与开启过程所需时间不同.
由图5~7可以得出,深水闸阀执行机构在第4.5 s左右完成开启.
由图8~10可以得出,深水闸阀执行机构在第3 s完成闸阀执行机构关闭过程.
本文介绍了一种内部充满补偿液的深水阀门执行机构及其压力和容积补偿机制,并且利用SimulationX建立了深水闸阀液压执行机构液压控制时的简化模型.通过仿真分析,得到了执行机构工作过程中活塞速度及液压腔流量和负压腔流量的变化曲线,证明了该软件在执行机构液压控制分析应用上的可行性,为研究深水闸阀执行机构的动态特性及其优化设计提供了参考依据.
The authors have declared that no competing interests exist.
| [1] |
Overview of subsea systems engineering [C]. |
| [2] |
水下卧式采油树顶部堵塞器设计要素 [J]. |
| [3] |
ISO 13628-6: 2006. Petroleum and natural gas industries. Design and operation of subsea production systems. Part6: Subsea production control systems [S]. |
| [4] |
水下执行机构的液压控制研究 [J]. |
| [5] |
SimulationX多学科建模和仿真工具 [J]. |
| [6] |
SimulationX及硬件在环仿真在伺服压力机设计和研究中的应用 [J].
|
| [7] |
基于SimulationX的斜盘柱塞泵的模拟仿真 [J]. |

/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}