上海交通大学船舶海洋与建筑工程学院,上海 200240
中图分类号: U674.951
文献标识码: A
文章编号: 2095-7297(2014)03-0234-06
收稿日期: 2014-08-19
网络出版日期: 2014-09-20
版权声明: 2014 海洋工程装备与技术编辑部 版权所有
作者简介:
作者简介:刘亚东(1972--),女,副教授,主要从事船舶水动力学研究.
展开
摘要
对采用非自控组合水翼系统的双体小水线面水翼复合船(HYSWATH)模型进行了浮态及阻力性能的试验研究,测量并分析了模型的吃水,纵倾角,阻力随航速,水翼位置和攻角变化的规律.试验结果表明HYSWATH模型在体航,过渡和翼航等不同航行状态时的纵倾角都比较小,说明非自控组合水翼系统可以保证HYSWATH模型在整个航行过程中的浮态;同时,前水翼的位置和攻角的变化对HYSWATH模型的阻力性能和船模进入翼航状态的速度影响很大,并能改善过渡状态时船舶的阻力性能.
关键词:
Abstract
The model test of hydrofoil small waterplane area twin-hull ship (HYSWATH) scheme developed in this paper is carried out to get the buoyance and resistance performances. Various characteristics of the total resistance, draft and trim with different ship speeds, locations of hydrofoils, attack angles of foils and locations of the center of gravity of ship have been measured and analyzed. The results of the model test prove that the buoyance and resistance performances of HYSWATH model are very good. The location of hydrofoils, attack angles of foils and location of the center of gravity of ship influence the resistance and velaity of the HYSWATH, and improve the resistance pertormance of HYSWATH in transitive state.
Keywords:
复合船型的概念最早由美国的大卫·泰勒舰船研究发展中心(DTNSRDC)于20世纪70年代提出,并且该中心当时致力于单体小水线面水翼复合艇(HYSWAS)的可行性论证工作[1].1981年,美国华盛顿大学的研究人员提出了多体水翼船的概念.研究指出,按70%的浮力和30%的水翼动升力组成的"水翼小水线面船"和"大型水翼复合船",无论在静水还是波浪中具有相当优良的性能[2].20世纪80年代中后期,日本东京大学的研究人员设计了一种双体水翼船(HC),研究发现HC在阻力及耐波性方面均有很优良的性能[3].其后,包括南非,挪威,韩国,德国,法国在内的多个国家也分别对水翼复合船型进行了详细全面的理论分析,模型试验和小型试验艇的海上航行试验,均取得了很大的进展,验证了水翼复合船型的优良性能 [4].
小水线面双体船(SWATH)性能方面的最大优点就是它显著地改善了耐波性,但是SWATH的湿表面积比使用性能相同的单体船也增大了许多,其摩擦阻力随着航速的提高会迅速增大,限制了SWATH航速的提高[5].
水翼艇主要是靠高速航行时艇底下面的水翼产生的动升力来支撑全部艇重,将艇体完全托出水面,从而达到减小阻力,提高航速,改善耐波性的目的.但是,当水翼艇的尺度增大到一定程度后,水翼提供的升力将不足以承载艇体的排水量,从而使上部艇体不可能完全脱离水面,因此水翼艇存在无法大型化的问题[6].
为此,考虑在SWATH两个片体之间的前后分别设置水翼,并适当选择前后水翼之间的距离,依靠水翼的动升力来承担50%~60%的静水浮力,理论上能够减小35%~45%的湿表面积,从而提高SWATH的航速,为大型化提供保证,同时,由两个水翼所产生的力矩能克服Mank力矩的作用,使该船型在高速领域也能正常安全航行.这种双体小水线面水翼复合船(HYSWATH)应能兼备SWATH和水翼艇的优点[7].本文对该船型的浮态和阻力性能进行了试验研究,以验证其合理性.
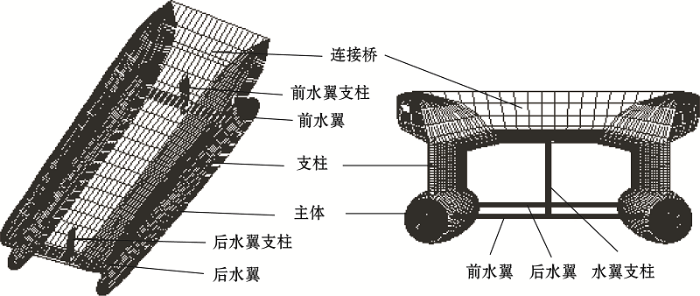
本文结合总布置,结构,建造等方面的要求,确定了静排水量为400 t的双体小水线面水翼复合船(HYSWATH-400)的船体线型,支柱与下体的连接形式以及水翼的形式和布置[8-9],如图1所示.以此为研究对象,进行了浮态及阻力试验研究,模型(缩尺比为1:20)及静浮状态如图2所示.其中,水翼采用非自动控制方式,固定安装在片体上.
试验在上海交通大学船模拖曳水池进行,主要试验设备包括:
(1) 拖曳水池,110.0 m(长)×6.0 m(宽)×3.0 m(深);
(2) 拖车,跨度6.0 m,最大速度6 m/s,配机械式阻力仪;
(3) 陀螺仪,位移传感器,加速度传感器.
阻力试验采用常规的试验方法,机械式阻力仪通过两根细钢丝将船模与阻力仪连接,船模所受阻力通过钢丝传递到阻力仪上.
HYSWATH-400模型试验采用Froude相似准则.模型主要参数如表1,表2所示.
表1 HYSWATH-400模型船体主要参数
Table 1 Main parameters of the hull of HYSWATH-400 model
| 参 数 | 取 值 | 参 数 | 取 值 |
|---|---|---|---|
| 静水排水量Δ0/kg | 50 | 主体长度LB/m | 1.620 |
| 翼航排水量Δ1/kg | 30 | 主体直径DB/m | 0.101 |
| 垂线间长LP /m | 1.73 | 主体排水中心纵向位XCB/m | 0.053 |
| 型宽B/m | 0.835 | 静浮浮心纵向位置XC0/m | 0.005 |
| 型深D/m | 0.44 | 翼航浮心纵向位置XC1/m | 0.019 |
| 静水吃水d0/m | 0.265 | 重心纵向位置Xg/m | 0.005 |
| 翼航吃水d1/m | 0.165 | 重心高度KG/m | 0.268 |
| 支柱长度LS/m | 1.296 | 纵摇惯性半径ryy/m | 0.394 |
| 支柱高度HS/m | 0.132 | 纵向稳心半径(翼航40 kn)Ryy/m | 0.416 |
| 支柱最大厚度t0/m | 0.050 | ||
| 支柱水线面积A0/m2 | 0.107 | 纵倾初稳心高度(翼航40 kn)H0/m | 0.276 |
| 水线面积中心纵向位置Xf/m | -0.035 | ||
| 船体纵摇周期T0/m | 2.96 | 片体中心距2b/m | 0.540 |
表2 HYSWAYH-400模型水翼和水翼支柱主要参数
Table 2 Main parameters of the hydrofoil and foil-support of HYSWATH-400 model
| 参 数 | 取 值 | 参 数 | 取 值 |
|---|---|---|---|
| 前水翼弦长bh1/m | 0.058 | 后水翼弦长bh2/m | 0.069 |
| 前水翼展长sh1/m | 0.395 | 后水翼展长sh2/m | 0.422 |
| 前水翼厚度th1/m | 0.005 | 后水翼厚度th2/m | 0.006 |
| 前水翼设置角α1/(°) | 1 | 后水翼设置角α2/(°) | 2 |
| 前水翼位置至船艏的距离lf/m | 0.162 | 后水翼位置至船尾的距离la/m | 0.122 |
| 前水翼升力系数CL1 | 3.12 | 后水翼升力系数CL2 | 3.03 |
| 前水翼支柱弦长bs1/m | 0.058 | 后水翼支柱弦长bs2/m | 0.069 |
| 前水翼支柱高度hs1/m | 0.241 | 后水翼支柱高度hs2/m | 0.241 |
| 前水翼支柱最大厚度ts1/m | 0.005 | 后水翼支柱最大厚度ts2/m | 0.006 |
为了考察水翼位置及攻角大小对HYSWATH船模浮态和阻力性能的影响,船模试验采取的方案为排水量,船体重心,后水翼的位置和攻角均保持不变,只改变前水翼的纵向位置和攻角,具体见表3.其中,lf和la分别表示前水翼距主体首端点的距离和后水翼距主体尾端点的距离,αf和αa分别表示前后水翼的攻角.通过改变复合船型前水翼的纵向位置及攻角,分析比较不同方案的阻力性能,优选出阻力性能良好的HYSMATH船型.
表3 HYSWATH-400模型阻力试验方案
Table 3 Schemes of resistance test for HYSWATH-400
| 试验方案 | lf/m | la/m | αf/(°) | αa/(°) |
|---|---|---|---|---|
| 1 2 3 4 | 0.162 0.202 0.242 0.282 | 0.122 0.122 0.122 0.122 | 1 1 1 2 | 2 2 2 2 |
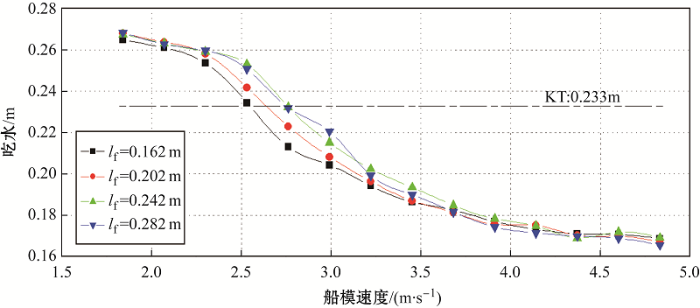
HYSWATH在航行过程中,船舶的浮态会发生变化.当航速较低时,水翼还没有发挥作用,此时船舶处于体航状态,也就是船舶的主船体还有一部分在水下;随着航速的增加,水翼产生升力,使得主船体逐渐脱离水面,并最终完全脱离水面,此时船舶的航行状态可称为翼航;由体航到翼航的中间过程称为过渡航态.用KT表示上部船体连接桥底部距基线的高度,吃水小于KT值即意味着模型已进入翼航状态.
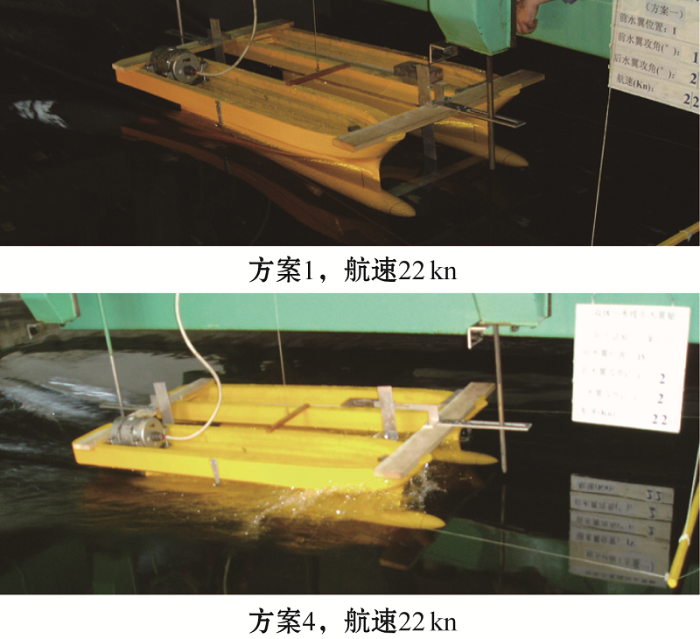
图3表示模型在不同航速下的吃水.可以看出,4个方案的HYSWATH进入翼航状态时的航速有明显的不同.以对应实船航速22 kn为例,见图4,方案1中的船模已经进入平稳的翼航状态中,主船体部分完全脱离了水面,而方案4的船舶正处于过渡航态,在艏部引起了飞溅,直到模型速度达到2.76 m/s时(相当于实船航速24 kn)才进入翼航状态.由此可以说明,前水翼的纵向位置影响着HYSWATH进入翼航状态的航速.
当HYSWATH进入稳定翼航状态之后,水翼位置的变化对吃水的影响就不太明显了,随着航速的变化,吃水曲线变得平坦和缓.过渡状态前后的一定范围内前水翼纵向位置的变化对吃水的影响还是比较大的.同时,增大前水翼的攻角,也会使HYSWATH的吃水减小.
图5表示HYSWATH-400在不同航速时纵倾角的变化.航速较低时,船体有比较明显的艏倾,这是因为后水翼的面积和攻角均大于前水翼;随着航速的增加,后水翼受船体和前水翼兴波的影响,其升力的增加没有前水翼的快,一定航速以后,前水翼的升力大于后水翼的升力,此时船体呈现艉倾状态.翼航过程中,纵倾角随航速的变化没有规律性,但总的变化幅度不大.同时,从4个方案的比较来看,前水翼的纵向位置变化对船舶航态的影响也没有很明显的规律性.
图5 HYSWATH-400模型不同航速下的纵倾角
Fig.5 Trim angle of HYSWATH-400 model at different speeds
总的来说,HYSWATH-400在从体航状态到翼航状态的整个过程中,吃水的变化较大,纵倾角的变化幅度较小.这说明HYSWATH-400在不同航行阶段均具有良好的浮态,没有出现过大的艉倾或者艏倾.
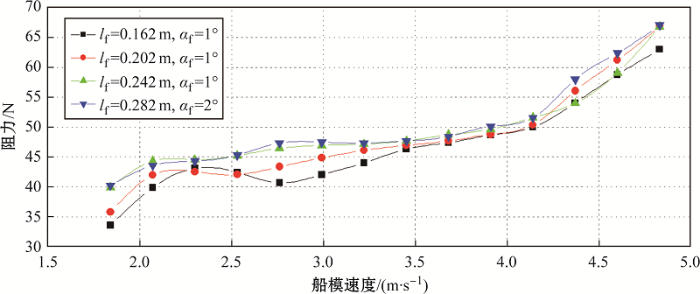
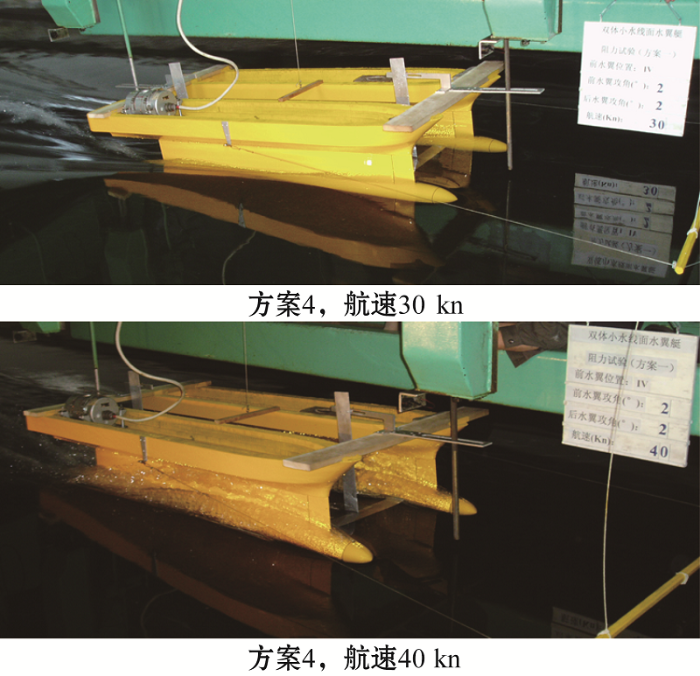
图6表示HYSWATH模型阻力的试验结果.由图中可以看出,前水翼纵向位置的变化对总阻力的影响比较明显,前水翼靠前的时候,有较明显的阻力峰;随着前水翼位置的后移,阻力峰逐步消失,阻力曲线的坡度变得很平坦.同时,所有的方案在高速区域,阻力的增加都比较快,以方案4为例,当船模进入翼航状态时,由图7可见,航速30 kn时几乎没有飞溅,航速到40 kn时飞溅很厉害,因此高航速区域总阻力的急剧增大应该是由飞溅导致的.
由图3,图5,图6可知,在低航速区域,吃水并不随航速的变化而变化,但由于前后水翼的位置,面积和攻角的不同,纵倾角有明显的差异,上部船体造成不同的船艏波,导致总阻力随前水翼位置的变化也有较明显的变化.
HYSWATH的总阻力可分为船体阻力及水翼阻力,其中船体阻力包括上部船体,支柱和片体阻力.低速航行时,船体阻力与常规排水型船类似,可用传统的方法进行计算.随着航速的提高,水翼升力增大,上部船体离开水面,水线位于支柱处,HYSWATH处于翼航状态,此时翼航吃水是位置参变量,需要通过求解作用于船体上的力和力矩的平衡方程式得到翼航姿态的吃水和纵倾角,再应用计算SWATH阻力的方法计算HYSWATH的阻力.水翼阻力的计算方法可参考水翼艇的有关算法.
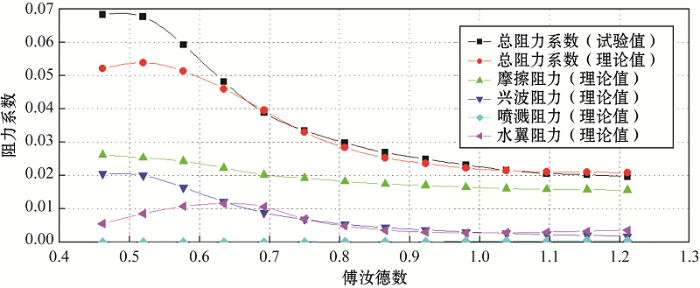
据此,在SWATH和水翼艇阻力计算方法的基础上,结合HYSWATH的运动特征,给出了HYSWATH翼航姿态及阻力的计算方法.以方案4为例,将理论计算结果与模型试验结果进行了比较,见表4及图8,一方面验证了理论计算方法的可靠性,另一方面还进一步验证了HYSWATH良好的浮态及阻力性能.
表4 HYSWATH船体阻力理论计算及模型试验结果
Table 4 The Theoretical Calculation and Test Results of Hull Resistance of HYSWATH
| 傅汝德数 | 总阻力系数 | 误差 /% | |
|---|---|---|---|
| 理论值 | 模型值 | ||
| 0.462 | 0.052096 | 0.068242 | -23.7 |
| 0.519 | 0.053814 | 0.067628 | -20.4 |
| 0.577 | 0.051314 | 0.059220 | -13.4 |
| 0.635 | 0.045941 | 0.048163 | -4.6 |
| 0.692 | 0.039525 | 0.038788 | 1.9 |
| 0.750 | 0.032896 | 0.033457 | -1.7 |
| 0.808 | 0.028324 | 0.029802 | -5.0 |
| 0.865 | 0.025237 | 0.026828 | -5.9 |
| 0.923 | 0.023533 | 0.024894 | -5.5 |
| 0.981 | 0.022173 | 0.023123 | -4.1 |
| 1.038 | 0.021421 | 0.021601 | -0.8 |
| 1.096 | 0.021008 | 0.020561 | 2.2 |
| 1.154 | 0.020894 | 0.020172 | 3.6 |
| 1.211 | 0.020828 | 0.019624 | 6.1 |
从表4所列数据的比较分析可以看出,当HYSWATH处于体航状态时,理论计算与模型试验结果之间的差异大于20%,其主要原因在于HYSWATH低速航行时上部船体不脱离水面,并形成较高的船艏波,兴波阻力增加,同时也导致船体湿表面积增大, 粘性阻力增大,这两点在理论计算时没有考虑.该船进入翼航状态后到运营速度的大多数航速下误差很小,理论计算与试验结果有相当好的一致性,说明本文提出的HYSWATH翼航状态阻力计算方法能得到可靠的结果,可以在初步设计时用于估算阻力和主机功率.
根据以上研究和分析,可以得出以下几点结论:
(1) 前水翼的位置往前移,可以使HYSWATH模型开始进入翼航状态的航速降低,并能很快度过过渡状态.阻力曲线的峰谷较为明显,有利于在整个速度范围内,尤其是在过渡状态附近改善该船的阻力性能.
(2) 前水翼的攻角减小时,在高航速区域总阻力下降,但度过过渡状态比较慢.
(3) HYSWATH模型从体航到翼航以及在翼航不同航行状态的纵倾角比较小,说明采用非自控组合水翼系统可以保证HYSWATH船型整个航行过程的浮态.
(4) 该船在高航速区域飞溅很大,总阻力急剧增大,且与水翼的位置和攻角的变化无关.在高航速区域减小飞溅是改善HYSWATH阻力性能的重要措施.
总体而言,高速HYSWATH是水翼艇和SWATH的有机组合,兼具这两种船型的优点.此项技术不仅可用于民用的海洋科学考察船,打捞救生,海峡渡船,沿海观光旅游等,还可用于军用海洋水声监听,猎雷扫雷及反潜巡逻.因此,研究HYSWATH船型的设计和水动力性能有着十分重要的意义.
The authors have declared that no competing interests exist.
| [1] |
A comparison of several hybrid surface ship concepts [J]. |
| [2] |
Hybrid hydrofoil technology applications [J]. |
| [3] |
国际新船型发展动态 [J]. |
| [4] |
国际混合式船型发展概况 [J]. |
| [5] |
|
| [6] |
多体水翼船综述 [J]. |
| [7] |
|
| [8] |
单体小水线面水翼艇的概念设计 [J]. |
| [9] |
单体小水线面水翼复合型高速船(HYSWAS)性能及概念设计研究[D] . |

/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}