湖南科技大学海洋矿产资源探采装备与技术湖南省工程实验室,湖南 湘潭 411201
中图分类号: P742
文献标识码: A
文章编号: 2095-7297(2015)01-0001-05
收稿日期: 2015-01-7
网络出版日期: 2015-02-20
版权声明: 2015 海洋工程装备与技术编辑部 版权所有
基金资助:
作者简介:
作者简介:万步炎(1964--),男,博士,研究员级高级工程师,博士研究生导师,主要从事海洋资源开发技术与装备的研究与开发.
展开
摘要
海底岩芯取样钻机是开展海洋地质及环境科学研究,进行海洋矿产资源勘探和海底工程地质勘察所必备的关键技术装备.以我国首台海底20m岩芯取样钻机为对象,从稳定支撑与调平技术,钻杆钻具接卸存储技术,遥测遥控与光纤缆高速数据通信技术以及海底钻机的事故安全逃生等方面系统地介绍了钻机的技术特点和海上试验等情况.
关键词:
Abstract
Seafloor core sampling drill is necessary equipment for marine geologic and environmental investigation. A 20 m seafloor core sampling drill is chosen as the study object. Its technical features and at-sea operation are described from the aspects of supporting and leveling mechanism technology, drill string making and breaking, drill rods storage technology, telemetry/telecontrol and high-speed data communication technology, as well as escape technology.
Keywords:
2010年之前,国内研制成功并已投入使用的海底岩芯取样钻机均属"海底浅孔岩芯取样钻机",其钻孔深度不超过2 m.该类型的钻机只能获取海底地表浅层的岩芯样品,仅可满足大洋富钴结壳矿藏调查的需要[1-2].事实上,我国自2005年起即已开始海底热液硫化物调查,但由于没有海底中深孔或深孔岩芯取样钻机,因此无法对已找到的十多处热液硫化物矿进行详细勘探,仅可利用电视抓斗等取样工具抓取矿体表层样品.鉴于我国对海底中深孔或深孔岩芯取样钻机的迫切需求,2008年初,国家863计划海洋技术领域启动了"深海底中深孔岩芯取样钻机的研制"项目,拟自主研制钻深能力达到20 m的海底中深孔岩芯取样钻机系统.
本文较全面地介绍了海底20 m岩芯取样钻机的研制,包括其技术特点,工作模式及海上试验情况.
海底20 m岩芯取样钻机系统从空间位置可分为两个部分[3]:位于海底的钻机本体和固定安装在母船甲板上的操控与供电子系统.铠装光纤动力复合电缆将海底钻机本体和甲板操控与供电子系统两个部分连接起来,并被视为甲板操控与供电子系统的一个部件.
与我国自主研制的海底浅地层岩芯取样钻机比较,海底20 m岩芯取样钻机不仅在钻深能力上提高了10倍以上,而且在稳定支持与调平技术,钻杆钻具接卸存储技术,遥测遥控与光纤缆高速通信技术以及事故安全逃生等方面都表现出了鲜明的技术特点和创新点.下面分别予以介绍.
海底20 m岩芯取样钻机调平支腿设计采用了液压马达驱动丝杆螺母机构向外伸展的形式,这就使得整个支撑范围变得更广,进一步提高了钻机的稳定性.同时,液压马达驱动丝杆螺母机构具有能自锁,调节速度快,占用高度小,重量轻等诸多优点.该调平支腿可在15°范围内将钻机调平[4].
在利用调平支腿对钻机进行调平的过程中,其"脚掌"在地面上会有水平滑移.为了使调平过程能够顺利进行,这种水平滑移阻力不能太大,否则将卡死支腿或损坏支腿驱动机构.但是,为了保证钻探作业中钻机的稳定支撑,又要求调平之后的"脚掌"不能再有任何的水平滑移.由于简单的固定式"脚掌"的水平滑移阻力是不可调节的,因此需要通过仔细设计"脚掌"面积和接地比压来在可以滑移和滑移阻力最大之间求得妥协兼顾.本钻机为了解决这一问题,创造性地设计了带液压刹车的滚轮式"脚掌".在钻机调平过程中先利用液压力松开滚轮的刹车,让"脚掌"在地面上以较小的阻力滑移;当调平过程结束后,先液压刹死滚轮,再开始钻探作业.在滚轮表面设计了纵横两个方向排列的防滑齿,该防滑齿可嵌入海底表面风化的岩层并产生较大的静摩擦力,从而保证钻机在钻探作业过程中可以稳定支撑钻机,防止发生侧向滑移.钻探作业结束需要收回支腿时,先液压松开滚轮刹车,然后再将支腿收回.
海底20 m岩芯取样钻机的一个显著特点是它需要在海底全自动遥控接卸钻杆钻具.对于海底钻机而言,当钻机的钻深能力大于5 m时,就不大可能用一根钻杆钻到底(当钻杆过长时,要求钻机的高度也很高,这就使得钻机在下放,回收以及稳定支撑,调平等方面变得非常困难),此时需要采取分段取芯技术,即从储管架上取出钻杆一根根连接下去,提钻时再一根根卸开钻杆并放回储管架.
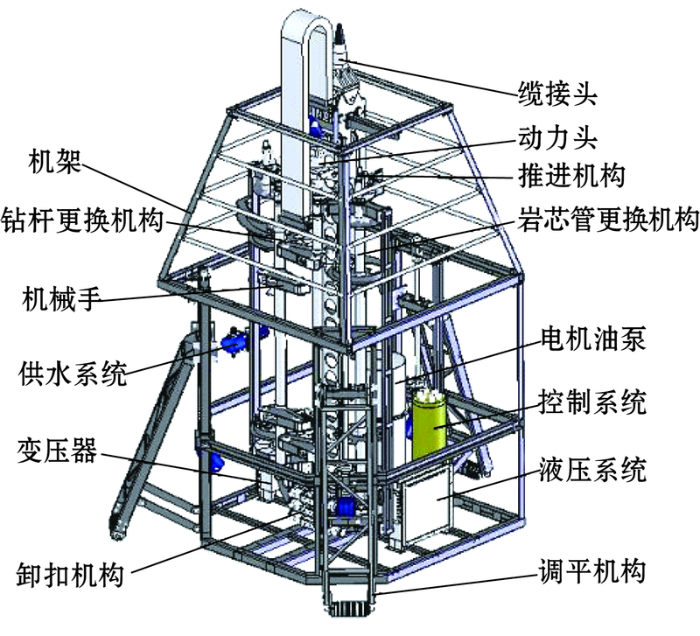
海底20 m岩芯取样钻机采用两个单排转盘式储管架,分别存放钻杆和岩芯管组件.每个储管架各附带一个机械手(称为移管机械手),分别用于钻杆和岩芯管在孔口和储管架位之间的移送和定位.两个转盘式储管架结构基本相同,均采用油缸驱动带离合器控制的正反双向摆角转动,油缸驱动锥形插销精确定位机构;每个储管架附有两只立轴同步摆动式双机械手,用于双向抓取及移送钻杆或岩芯管.桅杆架滑轨下部安装有串联的双夹持器,分别用于夹持套管和钻杆钻具,并与机械手配合拧卸钻杆钻具下部丝扣.钻杆钻具上部丝扣则通过与钻进动力头集成于一体的螺纹强力卸扣机构与机械手配合进行拧卸.钻机本体结构示意图如图1所示.
图1 海底20 m岩芯取样钻机本体结构示意图
Fig.1 Structural model of 20 m seafloor core sampling drill
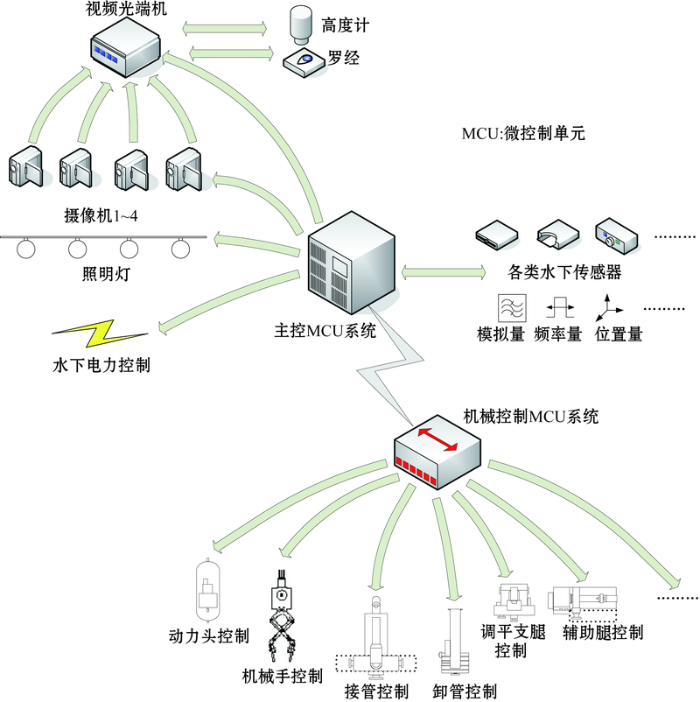
海底20 m岩芯取样钻机在海底工作时与母船上操作人员的距离达数千米,钻机的全部工作参数及状态信息,包括多个海底摄像头彩色视频信号,钻进系统参数,液压系统参数,供电系统参数,钻机的姿态以及离底高度等,全部依靠传感器系统进行数据采集,经机载计算机处理后通过光纤动力复合电缆向甲板操作计算机实时高速传递.同时,操作人员对钻机下达的操作指令也需通过光纤动力复合电缆向机载计算机传输.由于海底20 m岩芯取样钻机的各种传感器,监控摄像头数量多,且精度和实时性要求高,使得深海长距离光纤通信技术,高效的视频压缩编解码技术,机载机械控制系统和嵌入式系统低功耗等技术显得越发重要.
铠装光纤动力复合缆内包含4根单模光纤,两端通过光纤视频通信模块将光信号转成电信号,然后分别连接到机载控制系统和甲板操作控制系统.为了提高系统的稳定性,光缆通信方案中采用了"双纤备份"的策略,即视频光端机之间用2根单模光纤通信,当一根光纤发生故障时,依靠另外一根光纤也能保证完成通信和控制任务.机载控制计算机系统的总体结构如图2所示.
光纤视频通信模块采用专用集成电路(ASIC)设计技术,高速数字信号处理(DSP)技术以及全数字,非压缩,无损伤传输等高新技术,可将4路正向视频,4路RS-232数据等信号采用粗波分复用(CWDM)技术通过单模单芯光纤进行远距离,高质量的无损传输.由于采用数字技术,避免了模拟调频,调相,调幅的交调失真干扰以及图像与音频信号的相互串扰,克服了以往的通信技术常见的稳定性差,环境因素影响大等缺点.光纤视频通信模块能够支持各种高分辨率基带视频信号,自动兼容PAL,NTSC,SECAM等各种视频图像制式,视频接口采用标准的75 Ω BNC接口.光纤视频通信模块为单模单纤接口,传输距离可达30 km;光接口为FC口.同时,提供丰富的设备信号状态显示功能,如电源,光纤链路,视频信号,数据等指示功能.
需要采取安全逃生措施的主要事故是钻机在钻探作业过程中可能发生的卡钻事故.当发生卡钻事故时,钻机和母船将被锚固于钻探点,难以脱离.另外,钻探过程中如果突发供电,通信,控制或液压系统等故障,且短期内故障不能排除,则钻机将无法收回已经深入孔内很长的钻杆串,这也将导致钻机整机难以回收上船.这时,必须有可靠的技术途径使得孔内钻杆串能与地面钻机相脱离,以确保钻机的安全回收;或者在万不得已的情况下,将脐带缆末端与钻机脱离,确保脐带缆能安全回收.
海底20 m岩芯取样钻机配备有4种事故安全逃生技术,分别如下所述.(1) 如果仅发生卡钻事故,而钻机还可正常操作,则首先采取强力起拔措施,即利用钻机给进油缸的强大起拔力向上拔取钻杆.如果钻杆串被卡得不是很严重,这时钻杆串就有可能被拔出.(2) 如果强力起拔不能奏效,再进行卸扣操作,将孔内钻杆串卸扣脱开并抛弃,将钻机回收.(3) 如果钻进过程中发生了停电,通信中断等故障,使得钻机无法操作,且短期内不能解决,则应采取钻杆应急抛弃措施.钻杆应急抛弃措施包含两种:一种是液压油泵和控制系统仍能正常工作的情况(仅通信中断),可由控制系统在给定的时间之后自动启动钻杆液压抛弃功能;第二种是液压油泵停止工作但控制系统工作正常的情况,可由控制系统在给定的时间之后自动启动钻杆水压抛弃功能.(4) 如果发生严重卡钻,且强力起拔,卸扣,液压及水压抛弃钻杆措施都不起作用的情况,则考虑采用声学弃钻措施,丢弃钻机,回收脐带缆.
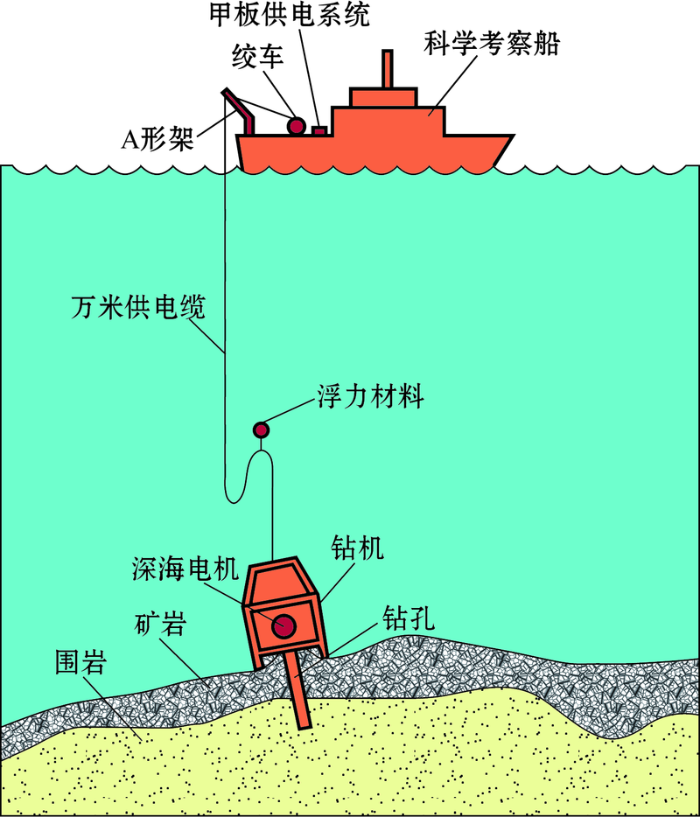
海底20 m岩芯取样钻机系统的工作模式如图3所示.
图3 海底20 m岩芯取样钻机工作模式示意图
Fig.3 Operation schematic diagram of 20 m seafloor core sampling drill
海底20 m岩芯取样钻机系统常规工作流程简述如下.母船到达指定的海上钻探点之后,先开启动力定位(DP)系统将母船定位.利用缆和绞车系统将海底20 m岩芯取样钻机吊放入海;在钻机接近海底时,启动机载离底高度计监测离底高度,同时操作绞车使钻机保持一定的离底高度,利用机载寻址摄像头传回的海底视频,图像进行实时观察,同时利用船舶DP系统对船位进行微调,以寻找合适的着底点(应位于钻探靶区内,海底地形,坡度等满足钻机着底要求).之后将钻机下放着底,然后再多放出数十米脐带缆,使缆在浮力材料的牵拉作用下在海底附近形成S形悬链状空间形态(见图3,可基本消除缆对钻机可能产生的拖曳力).启动钻机液压动力系统,放下钻机支腿使钻机在海底稳定支撑;如果因海底地形不平钻机处于倾斜状态,或要求钻杆以垂直角度钻入岩体,则利用可液压驱动伸缩的支腿将钻机调平.操作钻机开始钻探取芯作业,利用机载传感器与视像监控系统反馈的信息掌握和调整钻机的工作状态及工作参数.钻到预定的孔深后,结束钻探作业,收回钻机支腿,停止机载液压动力系统;利用缆和绞车系统将钻机回收至船上;卸下钻机上装满岩芯的岩芯管,取出钻得的岩芯.至此,一个作业回次即告结束,母船开赴下一个钻探点.
海底20 m岩芯取样钻机的样机搭载于我国"大洋一号"海洋科学考察船上,于2010年9月28日启航奔赴我国南海海域,实施样机的海上实钻取芯试验,如图4所示.
试验海区位于东沙附近.取样站号为22ST1-DD2,其具体地理位置为东经119.228 51°,北纬21.139 57°.
试验区域的海底地形特征是:小海山顶部侧翼转折端,底质为覆盖结核的沉积物.
海上试验步骤如下:
(1) 利用船艉折臂吊将钻机移至A型架下方.
(2) 连接光纤动力复合缆至钻机,连接光纤及高压接插件,装载钻杆钻具,调整补偿器,设置水压抛弃装置.
(3) 强电系统全程绝缘性能检查确认.
(4) 甲板通电试验.上电后检查各项参数,包括甲板电压,电流,水下电压等.检查4台摄像头图像是否清晰正常.之后启动液压系统电机,检查系统电压,电流是否正常.
(5) 钻机吊放下水.
(6) 钻机下水100 m,下放过程暂停,进行绝缘性能检测.
(7) 钻机下水500 m,下放过程暂停,进行绝缘性能检测;启动液压系统1 min,确认液压系统正常后关闭液压系统.
(8) 离底100 m,开启高度计,监测离底高度.
(9) 离底高度3~10 m,钻机寻址移位;在合适的地点着底.当X,Y倾角大于等于15°时提起钻机再寻址.确认地点合适后下放钻机着底,并继续放缆20~30 m.
(10) 电机和液压系统启动.
(11) 钻机调平.
(12) 按拟定的操作规程进行钻进操作.
(13) 达到规定的钻进孔深,结束钻进,收支腿,关闭电机和液压系统.
(14) 按拟定的下放回收方案将钻机回收至母船甲板.
(15) 卸钻取样.
(16) 对钻机进行检查和维护.
本次海试结果表明,系统样机在海试过程中性能稳定,钻机调平,钻进取芯,视像观测,遥测遥控,高压供电,钻杆接卸,数据传输与通信等正常,操作界面友好;实现了海试目标,达到了钻机全部设计指标.
我国首台完全自主研制的海底20 m岩芯取样钻机海试成功,有效解决了我国大洋资源勘探急需的重大装备问题,使我国在这一领域与发达国家的差距大大缩小,有力地推动了我国海洋技术的发展,同时,为我国今后研制更大钻进深度的海底深孔钻机奠定了基础.这对于我国加速海洋科学研究和资源开发,建设海洋强国具有重要的现实意义和战略意义.
The authors have declared that no competing interests exist.
| [1] |
深海浅地层岩芯取样钻机的研制 [J].DOI:10.3969/j.issn.1005-2763.2006.z1.011 URL [本文引用: 1] 摘要
深海浅地层岩芯取样钻机是进行深海底矿产资源勘探、深海底地质调查等不可缺少的重大技术装 备。长沙矿山研究院成功研制出我国第1台深海浅地层岩芯取样钻机,并已连续3年在太平洋我国富钴结壳勘探区大规模的成功应用。介绍了我国深海浅地层岩芯取 样钻机的技术特点、设计思路、功能与性能参数、实验室试验及海上实际应用情况等。
|
| [2] |
Research and development of seafloor shallow-hole multi-coring drill [C]. |
| [3] |
|
| [4] |
|

/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}