中海油研究总院,北京 100028
中图分类号: TE832.3+6
文献标识码: A
文章编号: 2095-7297(2015)01-0032-04
收稿日期: 2014-08-28
网络出版日期: 2015-02-20
版权声明: 2015 海洋工程装备与技术编辑部 版权所有
基金资助:
作者简介:
作者简介:姚海元(1977--),男,高级工程师,主要从事石油工业流动安全保障方面的研究.
展开
摘要
传统清管器在天然气凝析液管道清管作业中存在清管器运行速度过快,清管段塞大等诸多缺陷.为解决传统清管器的这一系列问题,射流清管技术得到了发展.为了分析射流清管器设计及应用过程中需要考虑的因素,利用OLGA 7.2模拟软件建立了海底管道清管模型,对射流清管器旁通率,管道管径,气液比,清管器质量等因素进行了分析,为射流清管器的设计及其应用提供借鉴.
关键词:
Abstract
There exist many problems such as high pigging velocity and long pigging slug in the pigging process in natural gas liquid pipelines by using traditional pig. In order to solve these problems, bypass pigging technology has been developed. To analyze relevant factors in the design and application of bypass pig, a subsea pipeline pigging model is built by using OLGA software (version 7.2) and the factors including bypass ratio of the bypass pig, pipe diameter, gas liquid ratio, pig weight etc. have been analyzed, which can provide reference for the design and application of bypass pig.
Keywords:
在石油工业中,利用管输流体推动活塞状物体清洁管道内壁的过程称为"清管"[1].随着油气田开发进入中后期,管道输气量降低,更易在管道中形成滞留液,减小了管道输气面积,降低了输气效率,并造成井口背压升高,进而影响产能.现场一般采用清管的方式解决这一问题.国外对这类管道大都采取定期投放清管器的方法来清除滞留液.传统清管器作业一般是将皮碗或球体置入管道内,依靠前后压差推动其在管道中运动,进而进行清管作业.由于前后密闭,此类清管过程中没有气体的前后流通,会造成清管的一系列问题:清管器运行速度过快,导致清管器上下游发生严重的窜漏,使清管效率降低,液体不能被完全清除;破坏减阻或防腐涂层,缩短管道寿命;对弯头,收球筒等产生巨大的冲击,进而损坏设备或清管器等;清管器在到达管道终端时,会将整个管线的大量积液在较短的时间内快速地输送到段塞捕集器中,液塞流量极大,极易造成捕集器的过载,造成生产中断事故[2].尤其对于深水海底管道而言,由于立管长,在相同生产条件下,清管过程中的段塞流会更严重.
为了解决传统清管器清管除液过程中存在的这一系列问题,射流清管器逐渐得到发展和应用.其工作原理是当清管器前后压差超过某一设定值时,旁通阀便打开,其开度与压差值有关,使管内流体从旁通阀通过,从而平衡清管器前后压力,控制清管器速度和清管段塞等[3-4].目前,壳牌石油公司在新西兰Maui油田的湿天然气管道进行了射流清管器现场试验,取得了良好效果.本文利用OLGA 7.2软件,针对清管器设计和应用过程中涉及到的主要影响因素进行分析.
采用的基础模拟数据为:气体流量 40×104 m3/d,气液比500,出口压力3 MPa.该管道长5.5 km,管径6英寸(1英寸=2.54 cm),包括了水平管段,起伏管段和立管管段,其中立管高度为50 m.下面分别对射流清管器旁通率,管道管径,气液比,清管器质量等因素对射流清管作业除液效果的影响进行敏感性分析.
假设基础模拟数据中气体流量,气液比,出口压力和管道长度不变,分析不同管径与射流清管器旁通率对清管段塞减少量的影响.
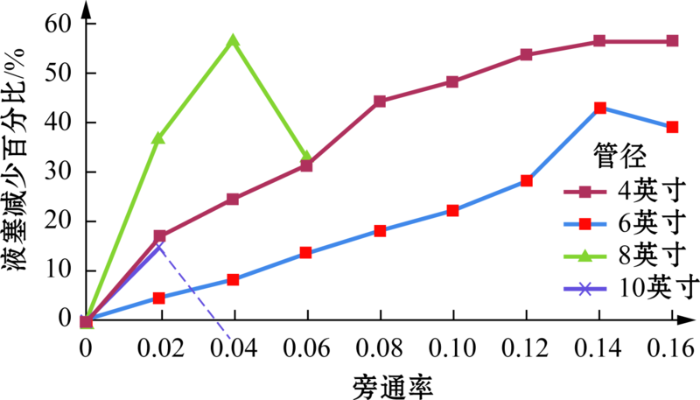
图1给出了管径分别为4,6,8,10英寸,旁通率在00.16之间时,射流清管器清管期间清管液塞的减少百分比与清管器旁通率之间的变化关系.由图1可以得到,管径为4英寸和6英寸时,随着旁通率的增加,清管液塞的减少百分比也随之增大.管径为6英寸,旁通率高于0.14时,清管液塞减少比例降低,表明旁通率过大,清除滞液能力下降.管径为8英寸时,旁通率超过0.04以后,清管液塞减少百分比反而出现降低.同样在管径为10英寸时,旁通率超过0.02后,清管液塞减少百分比出现负值.这主要是因为管径大,流速低,管线内滞液量大,在低旁通率时,可减少液塞量,若旁通率增大,清管器速度低,滞液量增大,反而会降低效果,甚至可能使清管段塞更大.
图1 不同管径时,清管液塞的减少百分比与清管器旁通率关系图
Fig.1 Pigging slug reduction percentage versus pig bypass ratio for different pipe diameters
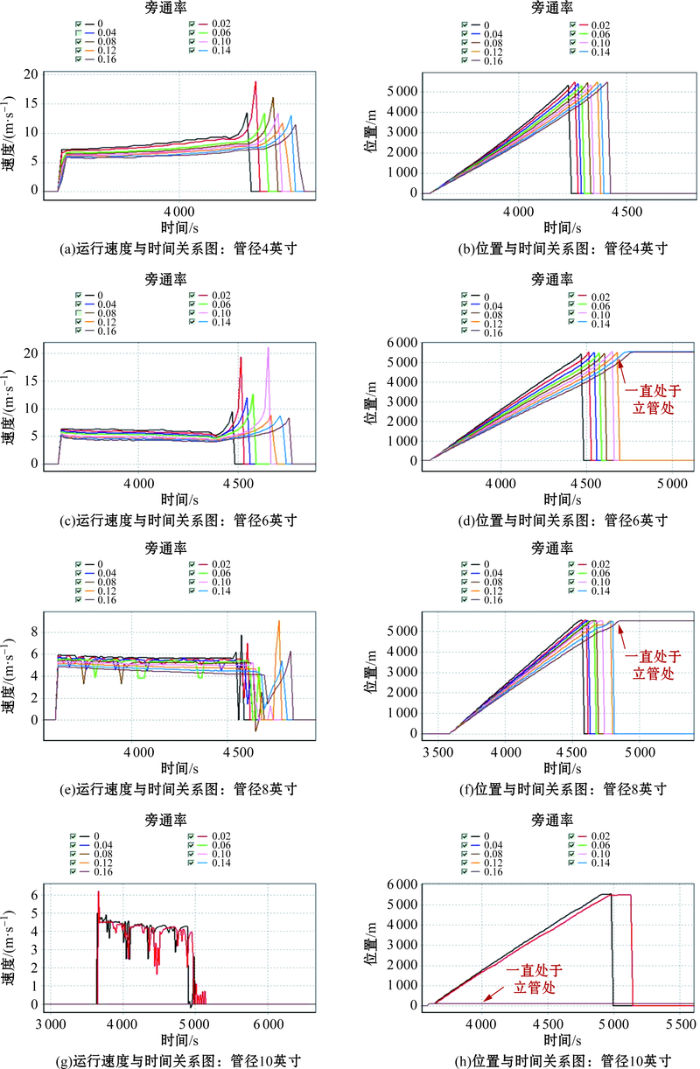
在清管作业过程中,清管器的速度及位置是重要的运行参数.图2为不同管径时,清管器管道中运移情况与清管器旁通率关系图.
图2 不同管径时,清管器在管道中的运移情况与清管器旁通率关系图
Fig.2 Pig movement conditions in pipeline versus pig bypass ratio for different pipe diameters
如图2所示,在清管器运行速度方面,管径为4英寸和6英寸时,清管器旁通率越大,清管器运行速度越低,但是在立管处,由于存在段塞的影响,不同旁通率时立管处清管器的速度大小规律性不强.在管径为8英寸和10英寸时,由于管径大,流速小,清管过程中有段塞出现,清管器运行速度有所波动.在清管器运移位置方面,不同时刻清管器沿管道的位置同运行速度有关,但是在管径为6英寸和8英寸时,随着清管器旁通率的增大,清管器前后压差减小,造成清管器滞留在立管处;管径为10英寸时,清管器旁通率的增大甚至可能造成清管器滞留在原处的情况,造成卡堵事故.
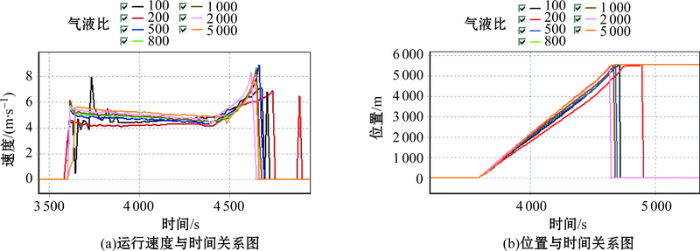
以6英寸管径管道为例,由图1可以看出:清管器旁通率为0.12时清管液塞减少比率最大.为了重点分析射流清管器清管过程的运移情况,下面选择6英寸管径,旁通率为0.12进行模拟分析,其他基础模拟数据见第1节.
图3为不同气液比时清管器管道中运移情况随时间变化关系图.可以看出:在气液比为100和200时,清管过程中出现段塞流型,清管器运行速度较其他气液比情况下波动更大.在图3(b)中,气液比为5000时,清管过程中清管器会滞留在立管处,造成卡堵.究其原因,由于气液比高,流体流过射流清管器的压降小,清管器前后压差小,造成在立管处没有足够的推动力来驱动清管器.
图3 不同气液比时,6英寸管径管道中清管器运移情况随时间变化关系图
Fig.3 Pig movement conditions in pipeline versus time at different gas-liquid ratios for the pipe diameter of 6 inch
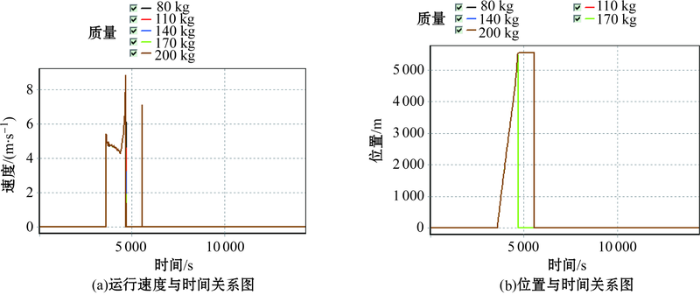
图4为不同清管器质量时,清管器管道中运移情况随时间变化关系图.
图4 不同清管器质量时,6英寸管径管道中清管器运移情况随时间变化关系图
Fig.4 Pig movement conditions in pipeline versus time at different pig masses for the pipe diameter of 6 inch
由图4可以看出:在所模拟的不同清管器质量范围内,清管过程中清管器运行速度变化不大.但是从图4(b)可以看出:相比其他模拟工况,清管器质量为200 kg时,清管器在立管处滞留一段时间,然后再移出管道.因此,在进行射流清管器设计和作业时,尤其是在应用于有立管的海底管线时,需要考虑到清管器质量,以避免清管器卡堵在立管位置.
通过以上分析可得到以下结论:
(1) 射流清管器相比常规清管器,在清管过程中有效延长了清管液塞到达段塞捕集器的时间,减少了液塞量,可避免捕集器过载事故.同时可降低清管器速度和清管器压力波动,实现平稳清管,减少了清管过程中的振动,降低了清管器对管线的冲击,从而也减小了清管过程中对管道内涂层的破坏风险.
(2) 针对具体管道参数以及与其对应的清管作业输量,气液比等条件,根据清管过程中的液塞减少比率,清管器运行速度和运移情况,确定射流清管器的最优旁通率范围.
(3) 清管器旁通率确定后,考虑所选择射流清管器的质量,其对清管器运行速度,甚至是否会停滞在起伏段或立管处有重要影响.
(4) 射流清管过程中,由于流体通过旁通孔时存在节流效应,为了避免在清管过程中生成水合物而造成管线堵塞,建议在进行现场作业时,提前分析清管过程中是否需要加注药剂并考虑其注入量等因素.
The authors have declared that no competing interests exist.
| [1] |
管道清管器发展现状 [J]. |
| [2] |
天然气凝析液管道射流清管器清管效果分析 [J].DOI:10.3969/j.issn.1007-3426.2013.06.010 URL [本文引用: 1] 摘要
采用传统清管器进行天然气凝析液管道的清管作业时存在着液塞量大、清管速度控制难度大等问 题,射流清管技术因其可以有效减少清管段塞,实现缓蚀剂等的布设,成为近年来研究的热点。在文献调研的基础上,采用多相流动态模拟软件OLGA建立海底管 道清管模型,进行了管道参数、工况参数以及海底环境参数等射流清管过程模拟分析,通过清管速度、压力、液塞流量变化等因素对比分析了射流清管器与传统清管 器的清管效果,得到了射流清管效果随旁通率的变化关系,为实际应用提供了指导。
|
| [3] |
天然气管道速度可控清管器的设计 [J].
为解决我国长输天然气管道清管过程中清管器速度过快或不稳定带来的一系列问题,对清管器的速度控制技术进行了研究。结合清管器的清管原理,提出了清管器速度控制方案,进行了速度可控清管器的结构设计,主要由普通清管器、电子仓、信息轮、电机仓、直流伺服电机、转阀、旁通壳体电机仓等零部件组成。分析了该清管器的工作过程,认为其在管道内的速度可以控制在预定范围内,但机械结构优化,旁通孔计算以及清管器在管道内运行时可压缩流体的数值模拟等技术问题仍需深入探索。
|
| [4] |
Modeling and simulation for pig with bypass flow control in natural gas pipeline [J].DOI:10.1007/BF03185671 URL [本文引用: 1] 摘要
This paper introduces modeling and simulation results for pipeline inspection gauge (PIG) with bypass flow control in natural gas pipeline. The dynamic behaviour of the PIG depends on the different pressure across its body and the bypass flow through it. The system dynamics includes: dynamics of driving gas flow behind the PIG, dynamics of expelled gas in front of the PIG, dynamics of bypass flow, and dynamics of the PIG. The bypass flow across the PIG is treated as incompressible flow with the assumption of its Mach number smaller than 0.45. The governing nonlinear hyperbolic partial differential equations for unsteady gas flows are solved by method of characteristics (MOC) with the regular rectangular grid under appropriate initial and boundary conditions. The Runge-Kuta method is used for solving the steady flow equations to get initial flow values and the dynamic equation of the PIG. The sampling time and distance are chosen under Courant-Friedrich-Lewy (CFL) restriction. The simulation is performed with a pipeline segment in the Korea Gas Corporation (KOGAS) low pressure system, Ueijungboo-Sangye line. Simulation results show us that the derived mathematical model and the proposed computational scheme are effective for estimating the position and velocity of the PIG with bypass flow under given operational conditions of pipeline.
|

/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}