中图分类号: P742;TE92
文献标识码: A
收稿日期: 2014-02-25
网络出版日期: 2014-01-30
版权声明: 2014 海洋工程装备与技术编辑部 版权所有
基金资助:
作者简介:
刘清友(1965--), 男, 教授, 博士生导师, 主要从事油气装备设计与仿真研究.
展开
摘要
钻柱升沉补偿装置是海洋钻井设备的重要组成部分, 在钻井作业中, 可补偿平台的升沉运动, 在保证井底钻压稳定的同时, 保障了钻井效率以及钻头和钻杆的使用寿命, 提高钻井安全性.目前, 我国钻柱升沉补偿装置需要从国外进口, 且价格十分昂贵, 因此, 研发具有我国自主知识产权的海洋钻井平台升沉补偿装置势在必行.在国内外升沉补偿装置相关资料的基础上, 对现有钻柱升沉补偿装置的结构,工作原理及应用情况进行分析, 并结合现用游车大钩升沉补偿装置在使用过程各种升沉补偿方式的优缺点, 提出了新型升沉补偿装置的设计方案, 优选出齿轮齿条式作为升沉补偿装置的新型补偿方式.对新型的齿轮齿条式补偿装置进行运动分析, 为新型升沉补偿装置的结构设计和仿真分析提供参考.
关键词:
Abstract
The drill string heave compensation system is an important part of offshore drilling equipment. During the operation, it can compensate heave motion of the platform, ensure a stable bottom hole pressure while drilling, keep drilling efficiency, protect the life of the drill bit and drill pipe, and improve drilling safety. At present, the drill string heave compensator device needs to be imported, and the price is very expensive, so the development of heave compensation system for offshore drilling platforms with our own intellectual property is imperative. On the basis of heave compensation device-related information and analyses on the structure, working principle and application of the existing drill string heave compensation system, considering the advantages and disadvantages of different heave compensation methods in practical operations, the new design scheme is proposed for heave compensation device. The rack-and-pinion scheme is selected for the new heave compensation device after comparison. Motion analysis on the rack-and-pinion device provides a reference for the structural design and simulation analysis of new heave compensation systems.
Keywords:
在海洋钻井作业时, 浮式钻井平台在波浪,海风等作用下, 会发生周期性的上下升沉运动, 这种周期性的升沉运动会使钻柱产生往复运动, 导致井底钻压发生变化, 问题严重时会使井下钻头脱离井底, 影响钻进效率, 降低钻头和钻杆使用寿命, 造成钻井安全隐患[1-2].在海洋钻井作业中, 增设钻柱升沉补偿系统是解决这一问题的主要方式.目前, 我国钻柱升沉补偿装置需要从国外进口, 且价格十分昂贵, 因此, 研发具有我国自主知识产权的海洋钻井平台用升沉补偿装置势在必行.本文在广泛调研国内外升沉补偿装置相关资料的基础上, 通过对现有钻柱升沉补偿装置的结构,工作原理及应用情况进行分析, 开展了以游车大钩升沉补偿装置为对象的新型升沉补偿装置的设计.
目前使用的游车升沉补偿装置基本都是液压式升沉补偿装置.按照其升沉补偿的动力提供方式可以分为三种类型: 被动式升沉补偿(PHC)[3],主动式升沉补偿(AHC)[4]和半主动式升沉补偿(SAHC)[5]下面对它们的工作原理进行分析.
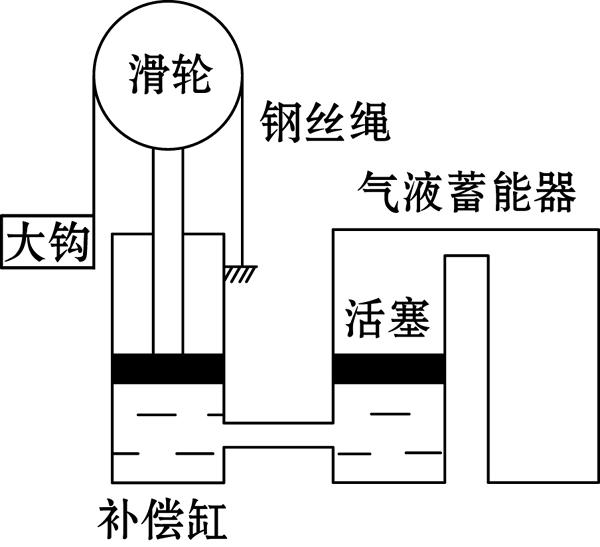
1.1.1 被动式升沉补偿装置
图1为被动式升沉补偿装置的原理图.被动式升沉补偿装置主要由滑轮,补偿缸活塞,补偿缸缸体,气液蓄能器,蓄能器活塞,储气罐和管线等组成.大钩载荷通过绕在动滑轮上的钢丝绳将力作用到补偿缸活塞上, 活塞下端由液缸内的液压力支撑, 补偿液缸的工作腔与气液蓄能器相通, 通过调节储气罐中气体压力, 即可调节蓄能器压力和补偿缸工作腔内压力, 从而调节井底钻压.
图1 被动式升沉补偿装置工作原理图
Fig.1 Operating principle of passive heave compensation device
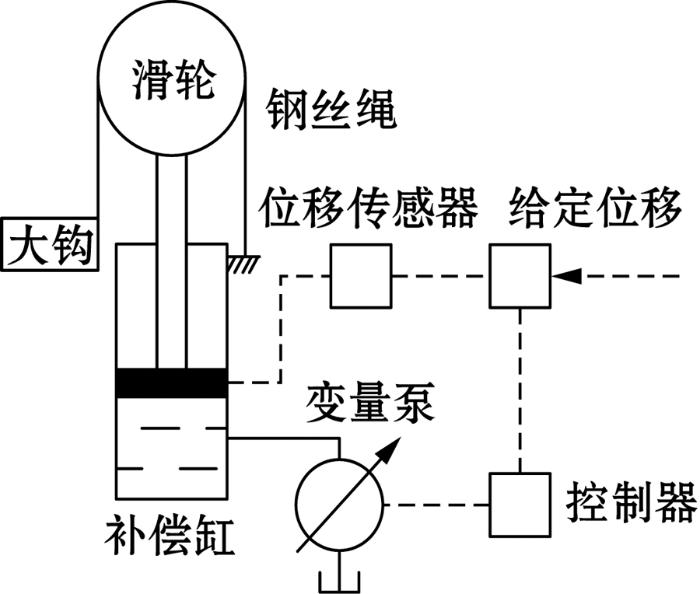
1.1.2 主动式升沉补偿装置
图2为主动式升沉补偿装置的原理图[6].主动式升沉补偿装置是一个闭环反馈系统, 当平台或船体随波浪上升(或下沉)时, 安装在活塞上的位移传感器检测出大钩位移, 再将大钩位移与给定信号进行比较, 比较得到的偏差信号输入控制器, 经控制器计算后输出控制信号控制泵转速和转向, 泵将补偿缸无杆腔液体排出补偿缸或向无杆腔供油, 使补偿缸的活塞杆下降(或上升), 从而使大钩和钻杆回到原来位置, 补偿大钩因船体升沉产生的位移.
图2 主动式升沉补偿装置工作原理图
Fig.2 Operating principle of active heave compensation device
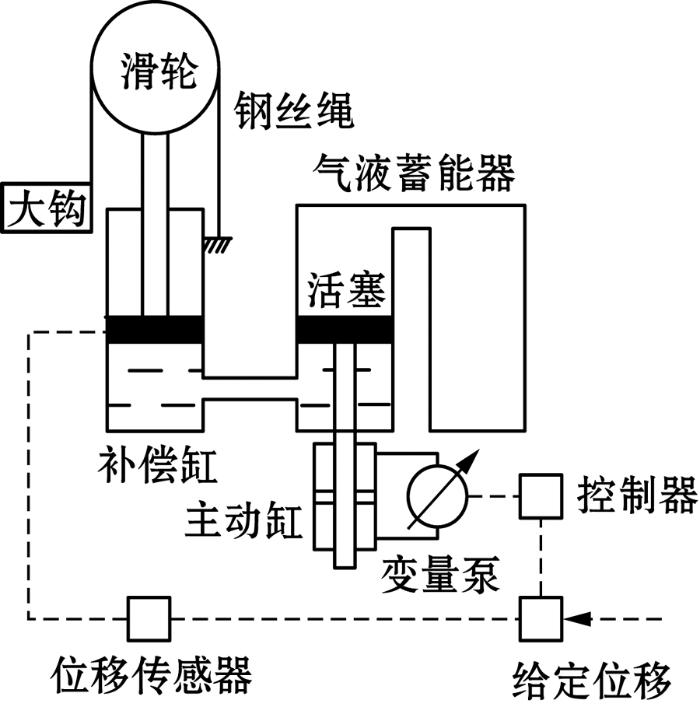
1.1.3 半主动式升沉补偿装置
图3为半主动式升沉补偿装置的原理图[2].半主动式升沉补偿装置在被动式升沉补偿的基础上, 增加了一个由液压泵驱动的主动缸, 当平台或船体发生升沉时, 蓄能器部分发挥被动补偿作用; 同时, 平台或船体发生升沉后, 活塞上的位移传感器测得活塞位移, 与给定位移信号比较, 得到的偏差信号输入控制器, 经控制器计算后输出控制信号, 控制变量泵向主动缸的上油腔或下油腔供油, 推动蓄能器活塞上下运动, 改变补偿缸无杆腔液体压力, 从而带动补偿缸活塞杆运动, 实现对大钩的主动补偿.
图3 半主动式升沉补偿装置工作原理图
Fig.3 Operating principle of semi-active heave compensation device
游车大钩的三种升沉补偿装置对比如表1所示[6].从表1中可以看出, 半主动式升沉补偿装置拥有被动式系统和主动式系统的优点, 综合性能较好, 在海洋钻井中应用最为广泛.目前使用的半主动式升沉补偿装置均采用液压系统, 与机械系统相比仍存在以下不足:
(1) 主动部分液压泵驱动的调压系统结构复杂, 驱动液压缸直径和行程都很大, 制造精度要求较高, 占地面积大, 设备成本较高.
表1 钻柱补偿方式对比
Table 1 Comparison of the drill string compensation modes
| 升沉补偿方式 | 原理 | 优点 | 缺点 | 应用情况 |
|---|---|---|---|---|
| 被动式 | 应用气体(空气)弹性来吸收能量和反馈被运动载荷消耗的能量 | 不需要连续输入能量 | 补偿性能不稳定, 滞后比较大 | 早期得到较好的应用 |
| 主动式 | 载荷作上下运动时, 由计算机控制的计量泵从驱动器液缸中活塞的一侧向另一侧泵送一定量的几乎不可压缩的流体, 可以将钻压的变化控制在10%以内 | 抗干扰能力强, 适应性好, 补偿精度高, 补偿性能稳定 | 需要用外部能量来支持每一次载荷循环所要求的功, 且结构复杂 | 因初始费用很高,要求的瞬时功率大,能源价格昂贵,系统复杂等, 应用受到限制 |
| 半主动式 | 是介于主动与被动之间的复合系统, 也需要连续输入能量, 但其所需的能量没有主动系统大 | 与主动式系统相比, 可减少所需的动力; 与被动式补偿器相比, 可改善力的变化和储气罐的体积 | 补偿精度介于主动与被动之间 | 应用较广泛 |
(2) 增加一个驱动液压缸, 为防止泄漏, 对系统的密封要求较高, 从液压泵到驱动液压缸之间由于流阻引起了能量损耗.
(3) 泵在加压时, 压力需要经过一段时间才能传递到驱动缸, 使活塞上下运动, 存在一定滞后性.
针对以上问题, 本文在半主动式升沉补偿装置的基础上, 对游车大钩升沉补偿装置的结构进行改进设计, 以期达到提高补偿装置补偿性能,降低系统能耗的目的.
综合现有的钻柱升沉补偿装置的结构[7-9], 根据功能的需要对现有的全液压式的升沉补偿装置的主动补偿进行改进, 将主动部分改为机械式方案.为控制活塞杆的直线运动, 必须选取一种机构推动活塞上下运动.根据机械原理知识, 常用的能够实现直线运动的机构如表2所示.
表2 机构方案选择
Table 2 Optional design for the mechanisms
| 机构 | 工作特点 |
|---|---|
| 凸轮机构 | 实现高速化, 结构紧凑, 可靠性高, 但易磨损, 加工困难, 行程小 |
| 曲柄滑块机构 | 磨损小, 传递动力大, 成本低, 但受空间限制, 曲柄直径不能太大 |
| 带传动 | 结构简单, 传动平稳, 有缓冲载荷和安全保护作用, 但效率低, 寿命短, 不能反向 |
| 链传动 | 效率高, 适用性强, 传递功率大, 成本低, 但易磨损, 噪声大 |
| 丝杠螺母机构 | 传动稳定, 精度高, 但长的丝杠加工精度比较难以保证, 运动距离有限 |
| 齿轮齿条机构 | 结构简单, 加工方便, 传动精度和耐磨性高 |
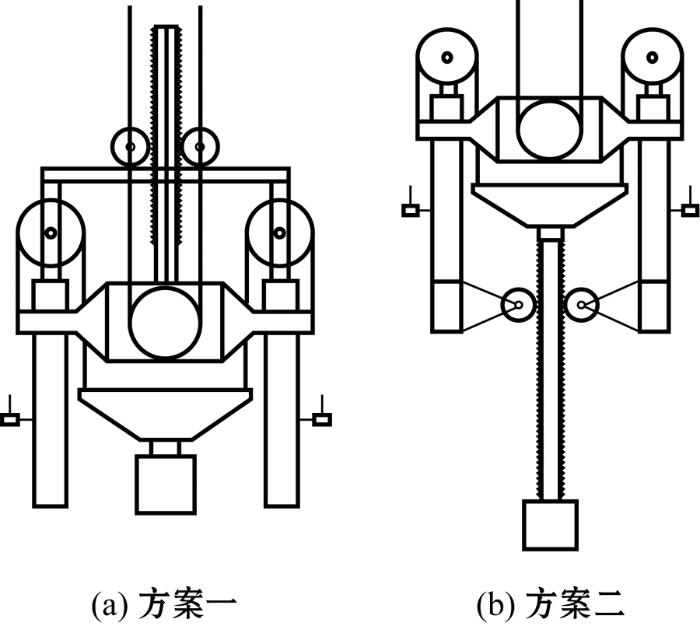
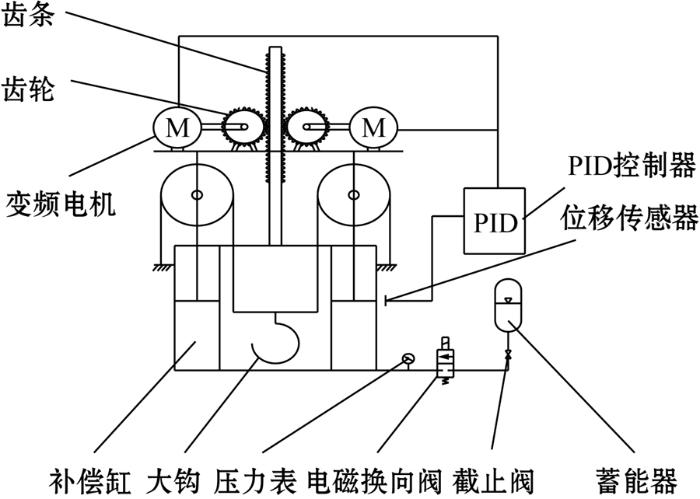
根据实际工况和各种机构的特点对比可知, 齿轮齿条机构更符合设计要求, 故选用齿轮齿条式机构作为传动机构.新型升沉补偿装置仍属于半主动式升沉补偿装置, 由被动补偿和主动补偿两个部分组成.被动补偿部分与半主动式升沉补偿装置相同, 采用无杆腔和蓄能器相连; 主动补偿部分采用电机和齿轮齿条机构控制活塞杆运动, 实现主动补偿.图4所示为两种齿轮齿条式升沉补偿方案.
方案一: 齿条固定在游车上, 齿轮固定在与活塞固连的支撑板上, 齿条不动.电机带动齿轮转动时, 齿轮和支撑板沿齿条上下运动, 带动活塞上下运动, 进行升沉补偿.
方案二: 齿条连接在下框架上, 齿条下端接顶驱, 齿轮和电机安装在液缸下端的支架上.电机带动齿轮转动时, 齿条上下运动, 进行升沉补偿.
对比两种方案: 方案一齿条安装在倍增程端, 齿条长度仅为补偿距离的一半, 结构紧凑; 而第二种方案, 齿条安装在下框架处, 齿条长度与补偿距离相等, 尺寸较大, 且稳定性不好.经比较, 选择方案一.
图5为齿轮齿条式升沉补偿装置原理图.该新型钻柱升沉补偿装置在正常钻进时的工作原理如下:
图5 新型齿轮齿条式升沉补偿装置工作原理
Fig.5 Operating principle of the new rack-and-pinion heave compensation device
(1) 当船体随波浪上浮时, 补偿液压缸,活塞以及连接在活塞上端的齿轮齿条机构随船上升.船体上升, 大钩载荷增加, 作用在补偿缸活塞上的力增大, 补偿液压缸无杆腔的压力增大, 蓄能器中的气体被压缩, 气体压力继续增大; 活塞处的位移传感器将位移信号传递到控制器, 控制器发出指令使变频电机以一定角速度旋转, 带动齿轮旋转, 活塞及活塞杆相对于缸体向下移动, 大钩向下运动, 从而使大钩不随船体上升.
(2) 当船体随波浪下沉时, 补偿液压缸,活塞以及连接在活塞上端的齿轮齿条机构随船下降.同时, 大钩载荷减小, 作用在补偿液压缸活塞杆上的力减小, 补偿液压缸无杆腔压力减小, 蓄能器气体膨胀, 气体压力继续减小; 活塞处的位移传感器将位移信号传递到控制器, 控制器发出指令使变频电机以一定角速度旋转, 带动齿轮反向旋转, 齿条直线上升, 活塞及活塞杆相对于缸体向上移动, 大钩向上运动, 从而使大钩不随船体下降.
新型钻柱升沉补偿装置采用双缸倒置系统位移补偿.位移型升沉补偿方案以负载的升沉位移作为主要控制信号, 其首要目标是使补偿对象的升沉位移为零位.在补偿过程中, 当负载受到一个较大的升沉位移扰动而偏离平衡位置时, 通过补偿装置负载以尽可能快的速度回到平衡位置.现有的几种升沉补偿装置均是通过控制补偿液压缸来实现主动补偿, 但新型的钻柱升沉补偿装置采用变频电机带动齿轮齿条机构实现对活塞杆的控制.这种方案保留了无杆腔的被动补偿方式, 同时采用变频电机直接驱动齿条运动实现主动补偿, 与纯液压的半主动式系统相比, 系统的反应时间更短, 省去很多管路连接, 减小泄漏危险.
当新型升沉补偿装置对大钩位移进行补偿时, 补偿缸的缸体和活塞杆之间会发生相对运动, 齿轮和齿条之间也存在相对运动.现对新型升沉补偿装置的运动规律进行分析[10].
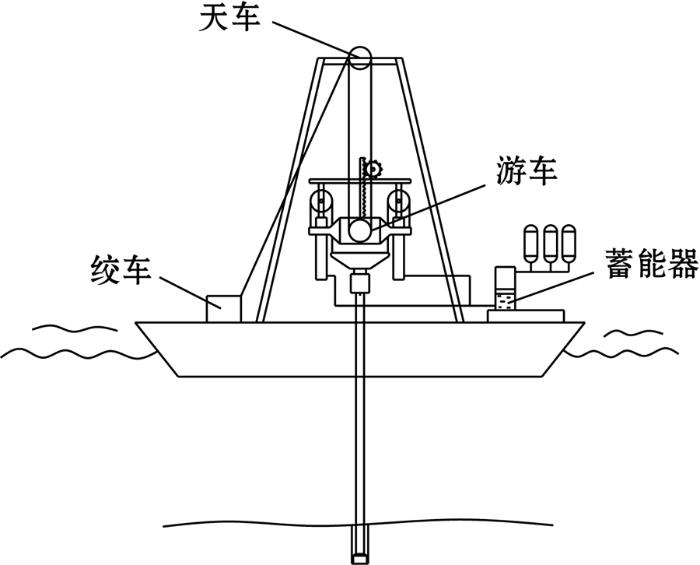
图6为新型升沉补偿装置总体布置示意图.新型升沉补偿装置通过上框架与游车固定在一起, 游车在钢丝绳作用下上下运动时, 整个齿轮齿条式升沉补偿装置也随之上下运动; 下框架由绕过活塞杆动滑轮的链条或钢丝绳悬吊在上框架的下端, 下框架下端接大钩和钻柱.蓄能器及储气罐等设备安放在甲板上.
图6 新型升沉补偿装置总体布置示意图
Fig.6 Overall schematic layout of the new heave compensation device
在对升沉补偿装置进行运动分析时, 涉及到的研究对象作如下简化[11-12]:
(1) 井架,天车,钢丝绳,游车上框架,补偿缸缸体以及安装在游车上框架上的齿条等都可以看作是与船体固连的刚性部件, 运动规律和船体升沉规律相同, 将其简化为质量为M1的船体.
(2) 游车下框架,大钩和钻柱构成的整体, 将其简化为质量为M2的大钩.
(3) 活塞杆,活塞杆上端动滑轮,齿轮支撑板及齿轮等组成的整体, 将其简化为质量为Mh的活塞.
在进行运动分析时, 参考系固连于地球, 船体,大钩和活塞的绝对位移分别为x1,x2和xh, 规定当船体处于无风浪状态时的平衡位置为位移零点, 向上运动为正, 向下运动为负.
船体升沉位移x1与海况和船体的结构形式有关, 通常可以根据实验方法得到船体的升沉位移x1与波高H的关系.假设海浪的波高为H, 海浪的周期为T, 升沉位移与波高的比值为μ, 则平台或船体的升沉运动规律为
活塞的位移xh与升沉补偿装置的补偿性能有关, 位移方向与船体升沉位移x1相同, 具有相同的周期, 但活塞的运动滞后于船体的升沉.由于大钩仍然存在一定位移, 所以活塞位移总是小于船体升沉位移.
大钩位移x2是钻柱经过升沉补偿装置补偿后得到的响应, 其大小反映了补偿效果的好坏.大钩位移x2的值越小, 系统的补偿效果越好.通常经过升沉补偿装置补偿后, 大钩位移的幅值都会大幅度减小, 这个位移作用在钻柱的上端, 成为驱动整个钻柱运动的激振源, 从而引起井底钻压的变化.
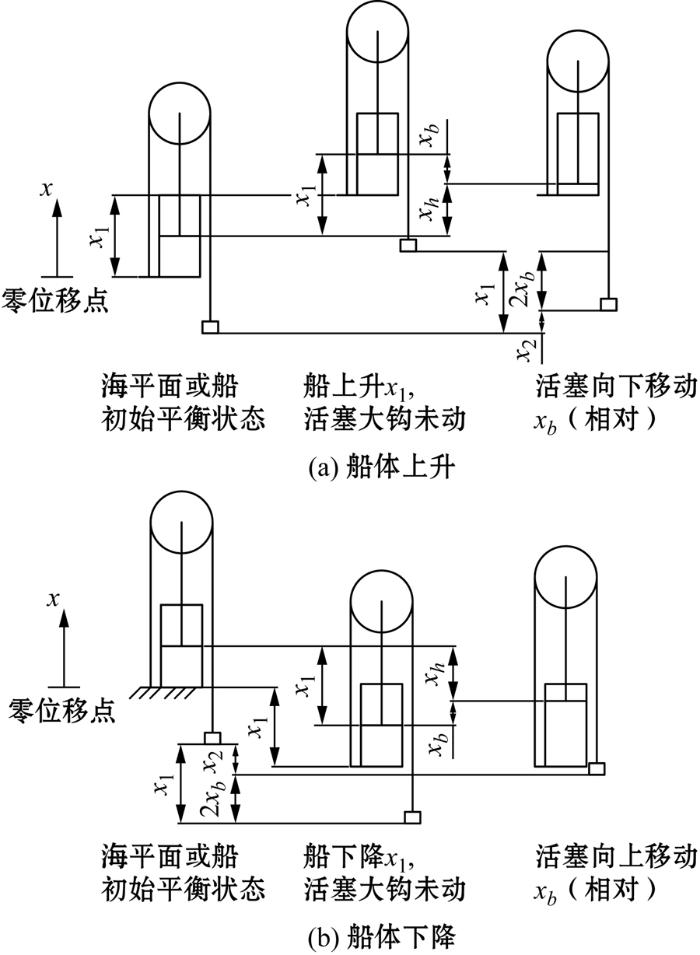
船体升沉位移,大钩位移和活塞位移三者之间的相对关系如图7所示.
图7 船体升沉,活塞和大钩位移相对关系
Fig.7 Displacement relationship among hull heave, pistons and hook
当船体上升位移为x1时, 活塞和大钩位移也为x1, 但由于升沉补偿装置的作用, 使得活塞相对补偿缸缸体向下运动xb, 因此活塞的相对补偿缸体位移为
xb=x1-xh.(2)
活塞杆倒置实现了倍增程, 大钩相对补偿缸缸体向下运动2xb, 则大钩位移为
x2=x1-2xb=x1-2(x1-xh)=2xh-x1.(3)
同理, 当船体下降时, 存在相同的运动关系.
对式(3)中的船体升沉位移,活塞位移和大钩位移分别求一阶导和二阶导, 则对应的速度和加速度关系为
由于齿条与游车上框架固连, 因此齿条与船体升沉的运动规律完全相同.齿轮的动力是典型的平面运动, 既存在与活塞运动规律相同的直线运动, 又存在与齿条啮合产生的转动.假设齿轮半径为r, 与齿条间的传动比为i, 齿条长度为L, 齿轮的平移运动的位移,速度和加速度与活塞的完全相同, 转动规律则需要由齿条的运动转化得到.齿轮的角位移,角速度和角加速度计算公式分别为
同时, 当船体发生升沉位移时, 系统的输入为船体的升沉位移.检测系统检测到船体发生升沉后, 将信号传给控制器, 控制器通过计算将控制信号输出, 控制变频电机工作, 使齿轮以一定的转速运转, 从而推动活塞以一定速度运动.根据活塞与大钩间的关系可得到大钩位移变化规律.
对被动式,主动式和半主动式游车大钩升沉补偿装置的工作原理和特点进行了对比分析, 发现半主动式升沉补偿装置综合了被动式和主动式升沉补偿装置的优点, 补偿精度高, 消耗能量低, 同时在海洋钻井中应用最为广泛.针对目前液压式升沉补偿装置存在的问题, 结合已有的升沉补偿装置结构方案, 提出一种新型的齿轮齿条式升沉补偿装置设计方案, 并在此基础上开展齿轮齿条式升沉补偿装置工作机理的研究, 完成了新型升沉补偿装置钻井工作时的运动学分析, 确定了船体升沉,大钩和活塞三者之间的运动关系, 为齿轮齿条机构的设计选型提供了数据支撑, 为新型升沉补偿装置的结构设计和仿真分析奠定了基础.
The authors have declared that no competing interests exist.
| [1] |
深水平台钻机技术现状与思考 [J]. |
| [2] |
钻柱液压升沉补偿系统设计研究 [D]. |
| [3] |
Fery D. Heave compensation [EB/OL]. , |
| [4] |
Active heave compensation on drill-ships in irregular waves [J]. |
| [5] |
-05-11. |
| [6] |
海洋钻井船升沉补偿装置的设计 [J]. |
| [7] |
-04-16. |
| [8] |
-06-19.
|
| [9] |
-11-19. |
| [10] |
|
| [11] |
波浪运动补偿稳定平台系统的设计与建模 [J]. |
| [12] |
深海采矿升沉补偿系统建模及其模糊控制仿真 [J]. |

/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}