上海航盛船舶设计有限公司, 上海 200011
中图分类号: U656.6;U665
文献标识码: A
文章编号: 2095-7297(2014)02-0156-04
收稿日期: 2014-05-29
网络出版日期: 2014-03-29
版权声明: 2014 海洋工程装备与技术编辑部 版权所有
作者简介:
陈牡丹(1984-),女,工程师,主要从事船舶电气设计方面的研究.
展开
摘要
介绍了"蓝潮1001号"液压环梁插销式升降装置的概况.分别描述了其控制系统的工作原理,控制系统的配置,操控部位的设置,控制模式及液压动力装置的控制.该平台已投入使用,经实际运行证明,该系统可靠性和安全性高,结构简单,操作方便,能够满足风电安装平台的升降要求.
关键词:
Abstract
The general situation of hydraulic ring beam and pin type jacking installation of "Lanchao 1001" is introduced. The basic work principle, arrangement of control system, setting of control position, control mode and hydraulic power control of jacking control system are described. "Lanchao 1001" has come into service. Through the practice, it is proved that the control system has the advantages of high reliability and safety, simple structure, and convenient operation, satisfying the jacking requirements of the wind turbine installation unit.
Keywords:
利用潮间带风电场实现海上风力发电已经成为世界新能源的发展方向.用于在此类区域进行风电设备安装的自升式风电安装平台也已陆续建造并投入使用.由上海航盛船舶设计有限公司自主研发设计的"蓝潮1001号"为钢质四桩腿自升式海上风电安装平台,艏艉部共设有全回转舵桨4台,可在作业区域机动调遣并具有辅助定位功能,用于江苏沿海一带风电设备的安装.作业水深为25 m,在水深很浅的地方可以趁涨潮进入.
自升式海上风电安装平台利用可升降的桩腿将船体上升到海面一定的高度,并能支撑整个平台在海上作业[1],避免水流,波浪对平台直接作用而影响平台作业的安全和稳定.因此,升降控制系统是自升式风电安装平台升降装置中的关键部分,其配置的合理性和可靠性是平台顺利实现升降的保证.本文介绍"蓝潮1001号"的升降控制系统,可为同类系统的设计和使用提供参考.
"蓝潮1001号"平台满足中国船级社(CCS)"海上移动平台入级与建造规范"和"海上移动平台安全规则".图1为本平台船体抬离海面的实际情况.
本平台升降机构为液压环梁插销式.桩腿升降和船体升降是依靠液压升降系统和升降装置控制系统进行的,通过控制套在桩腿四周的固定环梁和移动环梁上插销的交替插入和拔出(插销与设置在桩腿上的4排插销孔相配合)以及升降油缸伸缩等操控,实现并完成插桩,预压,船体提升,固桩,船体下降和拔桩等一系列动作.
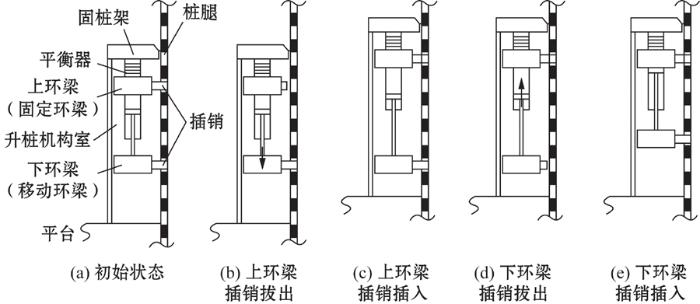
当平台(船体)抬离海面时,整个平台通过甲板面上的4个固桩架弹性地悬挂在4根桩腿之上.平台升降或桩腿升降依靠升降油缸活塞杆的伸缩带动上环梁上下运动,固桩架与桩腿的相对位置是由固桩架内上,下环梁四周的插销来限定的.图2以平台举升为例表示其中一排插销的动作情况,其中:图2(a)所示为初始状态,下环梁插销已插入桩腿插销孔,上环梁插销准备拔出,此时负荷已转移至下环梁插销上;图2(b)所示为上环梁插销拔出,升降油缸缸顶端即活塞上腔进油,活塞杆伸展,以下环梁插销为支点,向上推动上环梁,通过平衡器将固桩架向上顶升,连带平台向上举升;图2(c)所示为升降油缸走完一个行程(相当于桩腿插销孔一个节距)后,上环梁插销插入并将载荷转移至上环梁插销上;图2(d)所示为下环梁插销拔出,升降油缸活塞杆开始回缩;图2(e)所示为升降油缸回缩了一个行程后,下环梁插销插入,此时平台已举升了一个节距,升降油缸和下环梁回到初始状态,即可进行下一个循环.
利用同样的工作原理可实现放桩,预压,升起船体,降下船体,拔桩,提桩[2]等操作.
在安装平台定位于某一工作位置准备插桩前,必须进行压载调整,并调整甲板上的负荷分布,移动可变负载,使甲板上的负荷均匀分布,保证平台处于水平位置,便于桩腿铅直下垂,使得受力后各桩腿负荷均匀.在平台升降过程中也始终要监测平台的倾斜度,出现不正常的倾斜必须及时报警,通过可编程控制器(PLC)的平台平衡控制程序对各个比例换向阀的控制来调节桩腿的速度,使得倾斜度回到设定值以内[2].因此控制系统需要配备测量平台姿态的倾斜测量仪表或传感器.
在控制插桩深度和预压操作时都需要控制桩腿压力,其他工况下也必须随时监测各根桩腿的受力情况,因此桩腿受力情况的测量与显示仪表不可缺少.测量升降油缸中液压油的压力就能反映出液压缸作用在桩腿上的力.4根桩腿内升降油缸为双作用式,活塞杆端和缸顶端都需安装压力变送器.活塞杆端的压力变送器用来指示桩腿提升和拔出时的压力(或换算成载荷),缸顶端的压力变送器用来指示平台提升和预压时的压力(或换算成载荷).压力测量以及监测报警是整个控制系统中重要的组成部分.
由于上,下环梁上插销的插入和拔出等控制的需要,必须提供升降油缸行程的中间位置,插销的完全插入位置,插销的完全拔出位置等可靠定位信号,因而还需配置大量的行程开关和指示信号装置等.
升降油缸还需配置行程测量传感器,便于在控制台上观测到各升降油缸在运动过程中的位移情况.在上,下插销的受力分析及彼此间负载转移过程中也需要比较精确的位移信息.
平台升降操作是全船性的综合控制和统一指挥项目,必须能够应对一些突发情况,如控制电源断电,升降油缸液压软管破裂,液压动力装置的油箱液面低于规定高度,升桩机构部件损坏等,此时还应建立应急切断系统,每一操控部位都要设立应急停止按钮.在操作人员的干预下所有桩腿升降系统的动作应可立即停止并保持其所在位置.
平台升降控制是一个相当复杂的过程,既要有对4根桩腿协同动作的全局性控制,又要具备单根桩腿的局部调整性控制功能.在本平台最高一层甲板上设有中央控制室,室内主要布置了中央升降控制台.在中央控制室内能清晰地观察到4根桩腿的全貌,便于统一指挥整套桩腿的升降操作.另外,在每根桩腿旁边设现场控制台,可进行单桩控制和调整.
中央升降控制台和现场控制台可实现的控制模式并不完全相同.中央升降控制台可对4根桩腿进行远程控制主要有两种控制方式可供选择.
一种为"半自动控制".在此控制模式下,上,下环梁插销的插入和拔出以及升降油缸伸缩等相关操作将按照一定顺序进行.
另一种为"自动控制".如将控制模式选择为"自动控制"模式,工况选择在"平台提升"状态,4根桩腿就能同时自动进行"平台提升"动作.如工况选择在"平台下降"状态,就可进行与前述相反方向的自动操作.平台升降行程节距数可预先设定,升降行程节距数达到预定值后,平台升降的动作就停止进行.通常在中央升降控制台上既可进行单桩的半自动控制又可实现4桩联动的平台自动控制.
现场控制台只宜进行单桩半自动或单步操作的控制,在桩旁进行手动操作时其他桩腿的有关情况不是非常清楚,所以在控制中心没有指令下达的情况下操作人员不得贸然行事.
平台的控制模式受多方面条件的限制,不能随便选择.一般在平台的6种动作模式的操作中,"拔桩"只宜半自动控制.因装载不可能很均匀,各桩腿负载是有差异的,且"平台下降"时速度较快,平台容易倾斜而引发机械故障,所以"平台下降"时也不宜采用"自动控制"模式."桩腿提升"和"下桩"时,由于自动操作的4条桩腿仍然是独立运动,并且桩腿交错时间不齐,无法实现可靠的联锁并始终保持实时同步,因而只有在风平浪静的海况下才可选择"自动控制"模式.此时仍需注意各根桩腿伸出平台底的长度是否一致,随时进行调整,防止单根桩腿撞击海底的事故."平台提升"时速度较慢,插销动作有充裕的时间,操作人员也有足够的反应和处置时间,所以不论平台在水上(预压前)或出水后(预压后)都可以在调平平台倾斜后选择"自动控制"模式,这样可以加快平台提升的操作速度,节省时间.
以往的升降控制系统采用的是模拟显示仪表,手柄操作加PLC.在其中央升降控制台上设有各种开关,指示器,信号灯等,体积相当庞大,操作比较分散.本平台使用的升降控制系统采用数字化控制技术,集成了更多的功能.在中央升降控制台上除可实现升降作业的操作外,还集中了以下功能:控制液压系统电机的起动与停止,电磁阀的动作,液压油柜的加温等;监测所有的信号与船的状态;模拟桩腿的动作并记录位移数据;记录报警并提供输出接口;监测整个平台的倾斜角度.
中央升降控制台由工控机,显示器,PLC和包括不间断电源(UPS)在内的电源系统组成.外接2个倾斜传感器,与4条桩腿的现场控制台以及泵站控制和油柜加热冷却系统建立数据通信,与油柜加热冷却系统之间还有多路控制电缆连接,其目的是在中央升降控制台上能远程操控液压泵站内电机的起停.因平台升降作业前通常都要检查对角桩腿之间的倾斜度,所以要求配置2套倾斜传感器,以便同时监测4条桩腿的插入深浅,保证平台的水平位置.在中央升降控制台上可实现包含各单桩,双桩在内的局部和整体性操作和控制.
现场控制台由PLC,触摸屏和电源系统等组成,是平台升降控制系统中重要的组成部分.它对外接口很多,每一现场控制台外接的传感器有2路桩腿位移传感器,1~4号油缸进出口压力传感器,1~3号压力传感器和插销压力传感器,连接到行程开关的有固定环梁(上环梁)和移动环梁(下环梁)上各插销的进位,中位,到位共24只.现场控制台还外接多个能控制升降油缸伸缩及油量,控制插销油缸动作的电磁阀.现场控制台外接的控制与通信线路有比例调节阀的控制线和接至中央升降控制台的通信线.
现场控制台上设有直接手动控制各电磁阀的操作按钮,除此之外,主要的控制和显示都集中在触摸屏上进行.触摸屏主页面上可进行多页面切换,能分别显示桩腿动作,泵站状态,系统压力,系统报警和操作说明等.
在现场控制台上桩腿升降控制有"手动单步控制","半自动控制"和"自动控制"三种方式.手动单步控制方式是在相关的保障条件下手动分步地进行插,拔销的单独操作,可用于维修和调试.半自动控制模式是指平台相对桩腿进行一个行程节距(孔距)范围内升或降的自动控制."自动控制"则要在中央升降控制台的干预下保持4条桩腿的同步动作,此时应将现场控制台的控制权限由"现场控制"转为"远程控制",由中央升降控制台通过通信线路进行集中控制.
在进行桩腿升降操作前,必须检查电气程序的互锁情况.为防止由于推动桩腿运动的主缸及上下插销油缸间的动作不协调而引起桩腿或平台的坠落以及断销等重大事故,除在PLC中输入一些互锁程序外,还增设了有利于防止操作失误的手动提示功能[3].
平台升降装置中升降油缸和插销油缸的动作都必须由液压动力系统来支持.液压动力装置是平台升降控制系统中不可缺少的组成部分.为了便于管理,其中主泵等控制还能在中央升降控制台上远程操作.对应4条桩腿,设有4套液压动力站,每套液压动力站由2组(250+90) kW的液压泵组成,集中安装在液压间内.在液压泵站的成组控制柜旁增加了液压油柜加热冷却控制箱,以保证整套液压动力系统的正常工作.油柜加热冷却控制箱除了控制循环泵和加热器的工作外,还配有PLC及触摸屏,集中管理16台液压泵及循环泵的有关联锁控制要求,输出允许起动信号.在其触摸屏上可显示4套液压动力站的主要参数和运行状态,指示液压油柜的温度,液面高度,各类运行信号和报警信号.有关的监测报警信息还可通过通信线路送达中央升降控制台和现场控制台进行显示,也可通过通信线路在本控制箱的触摸屏上获取显示桩腿状态的页面.控制箱面板上布置了整套液压系统内主要电磁阀的手动控制按钮以及单个泵站故障时应急旁通阀的操作开关等.
"蓝潮1001号"平台选用的升降装置控制系统较之以前使用的同类系统性能上有很大提高,技术更为先进,操作使用更加方便.本平台自投产以来,平台移位多次,液压升降系统运行状况良好.平台的升降本是一件相当繁杂的工作,需要多人协同配合并存在一定的风险.整个作业过程需考虑的因素很多,历时较长.通常在定位前应对海底一定深度基土的承载能力进行计算,估算桩腿插入土中的深度,而且还必须控制在合理范围之内,过深,过浅都会影响作业.升降过程中还可能出现桩腿沉降不均,倾斜过大等不安全因素.这些问题对操作者特别是指挥人员的要求很高,必须沉着应对.从设计控制系统的角度出发,其功能可考虑得更加周全,尽量降低操作人员的工作强度.在新开发的控制系统中如能将类似"专家系统"的一些功能加以集成,解决一些现场快速计算,作业指导,应急预案处理提示等问题,则其功能将更趋完善.
The authors have declared that no competing interests exist.
| [1] |
海上自升式平台工作原理和基本特性 [J]. |
| [2] |
自升式海上风电安装船升降控制系统的设计 [J]. |
| [3] |
插销爬杆型液压自升式海洋石油钻井平台PLC控制 [J]. |

/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}