上海航盛船舶设计有限公司, 上海 200011
中图分类号: U674.35;U665
文献标识码: A
文章编号: 2095-7297(2014)03-0245-04
收稿日期: 2014-05-29
网络出版日期: 2014-09-20
版权声明: 2014 海洋工程装备与技术编辑部 版权所有
作者简介:
作者简介:文勇(1982-),男,工程师,主要从事船舶电气设计方面的研究.
展开
摘要
简要介绍了350 t自航起重船的电力推进系统设计概况.首先是船舶的主要功能及基本要求;接着给出电力系统的设计,包括发电机组的配置和主配电板的结构形式;然后说明了电力推进设备的选型及谐波控制方法;最后阐述了电力推进控制系统和功率管理系统的设计.
关键词:
Abstract
The electric propulsion system design of 350 t self-propelled floating crane is introduced. The following aspects are covered: the main function and basic demands of this vessel; power system design, including configuration of generator sets and structure of main switchboard; equipment selection of electric propulsion system and harmonic control method; electric propulsion control system design; power management system design.
Keywords:
随着建设上海国际航运中心相关政策的出台,对于具备较好的机动性,较大的起重能力,可在沿海及港内作业的自航式起重船的需求日益迫切.上海航盛船舶设计有限公司受上港集团物流有限公司的委托,研发设计了350 t自航起重船,于2011年底交船并投入使用.
该船为自航全回转起重船,服务于我国沿海和黄浦江沿岸的港口,能装卸各类集装箱船,货船捎带的大型重件或水工构件等,满足近海航区航行,遮蔽海域和港内起重作业的要求.电气部分设计满足中国船级社(CCS)现行规范,船级符号为"★CSAD 起重船,近海航区;★CSMD 机器处所集中控制,驾驶室遥控,电力推进系统".为了降低动力系统装机总容量,通过整合和优化,采用全船公共电站实现起重机,主推进装置,艏侧推和全船其他主要用电设备的统一调配.
本文对该船的电力推进系统设计进行总结,以期为将来的类似任务提供参考.
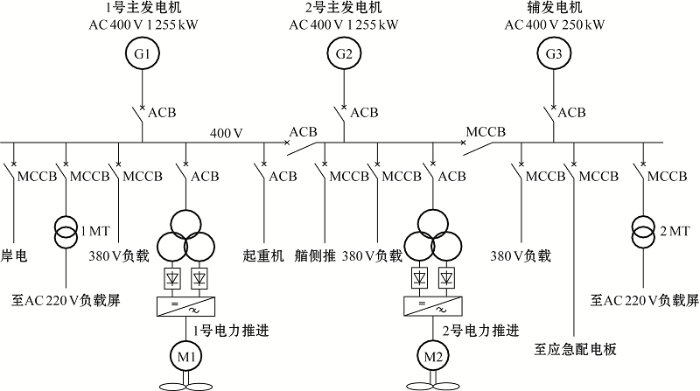
该船动力设备首先要满足起重作业的要求.350 t全回转吊机采用变频电力驱动,委托方要求一台发电机组即能提供吊机的工作用电,另配一台发电机组作备用,以保证起重作业的安全性和连续性.电力推进系统的设计是在此基础上统筹考虑的.采用电力推进方式也是出于环保和降低碳排放的目的.当该船在靠近岸线周边作业时有可能利用岸电来提供全船的电力,对降低黄浦江江面噪声和有害气体排放等都是非常有益的.由于提供推进的公共电站其主发电机组仅由两台组成,出于安全考虑同样要满足规范要求:在一台发电机组不工作时,剩余的机组应能向所有重要设备和船舶常用设备供电,同时应维持有效推进,即应保证船舶航速不小于7 kn(1 kn=1 n mile/h)或设计航速的一半,两者中取大者[1].该船的最大航速不超过10 kn(考虑转矩余量等因素设计航速定为8.5 kn).按要求在一台主发电机组退出工作时另一台主发电机组应能维持不小于7 kn的航速,为此在确定方案前做了相关的船模试验以确保能满足此要求.此公共电站的另一特点是此电站还包含一台250 kW辅发电机组.该机组在航行时一般不使用,主要为其他工况下的节能和改善起重机工作时可能产生的谐波干扰并兼做停泊发电机.如果起重机工作时谐波干扰严重,则用分区供电的方法将船上用电设备改由辅发电机组供电.该船另配一台150 kW应急兼停泊发电机组.该船电力系统示意图见图1.
按规范要求,主配电板汇流排的分段应采用断路器连接.该断路器应能切断其安装处可能产生的任何故障电流[1].因此,图1所示两台主发电机对应汇流排之间的联络开关采用了带过载,短路保护的断路器,而不能采用普通非电力推进船舶通常采用的隔离开关.
对于电力推进船舶的设计,谐波控制是一项关键技术.电力推进需要使用大容量电力电子装置,如整流,逆变设备.所有电力电子装置在实现功率控制和处理的同时,都不可避免地产生大量的谐波,很容易对电力系统产生影响[2].
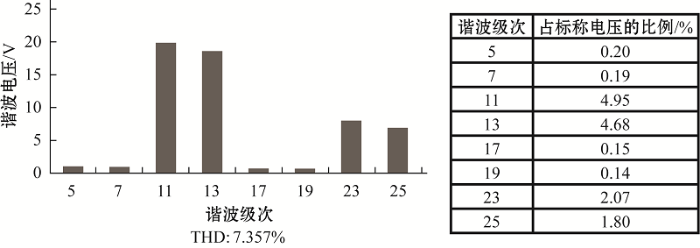
该船推进设备包括:左,右舷各一台900 kW变频推进电机;两台400 V/2×720 V,1250 kVA升压兼移相变压器(按组成虚拟24脉冲要求配置);两台400 V/710 V,25 kVA预充磁变压器;两套推进驱动柜(每套推进驱动柜包含逆变柜,整流柜,控制柜,水冷柜);两套制动电阻.全部推进设备由西门子工业自动化与驱动技术集团成套供货.左右推进装置按虚拟24脉冲要求设计,在理想或基本满足虚拟24脉冲运行的情况下,总的电压谐波失真(THD)容易得到控制,可按24脉冲运行条件来估算,计算值为3.345%.但是虚拟与实际使用情况会有差异,故此值不能作为送审和考核依据.在评估和提交船级社审查时应以可能出现的最严重情况来估算,确保实际使用过程中公共电网上的谐波干扰最严重时也不会影响设备使用和航行安全.当两套推进装置不具备工作在虚拟24脉冲的条件时(如主配电板上母线联络开关断开),则汇流排上谐波失真要按实际的12脉冲来计算,计算结果见图2,THD为7.357%.从计算结果可见,11次谐波电压已达标称电压的4.95%,接近规范中单次谐波电压5%的上限.能做到这一点还在于设计初期就对谐波污染问题进行重点防范,从源头上进行了控制,在订购主发电机时就对其直轴超瞬态同步电抗提出要求,要求其不得大于11%(实际为10.1%).其结果是避免了由于个别单次谐波超标而不得不增加滤波装置导致系统更为复杂的问题.当然,在发电机采用了较低的直轴超瞬态同步电抗值后与同等容量机组相比其短路电流就会明显增加,代价是主配电板上的馈电断路器要采用高分断型(使用分断能力70 kA).
共有4个部位可进行推进的操纵与控制,分别是:驾控台操作面板,集控台操作面板,左机旁控制箱和右机旁控制箱.
驾控台和机舱集控台上的操作面板基本相同(后者不带调光装置),设有双机操纵手柄,推进电机的转速和功率表,尾轴转速表,相关的控制按钮以及主要的报警和状态指示灯,可对左,右推进装置实现集中控制;并且将主车钟系统集成在操作面板上,使得布置紧凑,操作方便.机旁控制箱是供单机操作使用的,配有必要的仪表,按钮,指示灯和主车钟收信器.各操纵控制部位的控制权切换在机旁控制箱上实现.另外,在驾控台上还设有左,右车钟记录仪;在集控室内还设有左,右推进遥控系统中心控制箱.
推进控制系统是全船操作和控制的核心,与其他系统通过各类接口建立连接.
首先是与变频设备的接口.向变频系统发出的指令信号有启动,停止,复位,机旁控制选择,正转,反转,加速,减速,越控以及紧急停车,并通过操作手柄的位置控制推进电机的转速和转向.推进控制系统还向变频系统送出相关状态信息,例如本地操作,远程控制,检修模式,故障复位等,同时也接收变频系统运行的状态信号,包括运行,故障和要求故障降速的信号.
因操作面板上汇集了电力推进必要的一些报警和状态指示信号,所以与全船监测报警系统(AMS)也有相应的接口.该船监测报警项目不低于规范对电力推进船舶补充规定的要求,因而能够向推进控制系统提供必要的报警信号,监测报警的项目包括了尾轴和减速齿轮箱.
推进控制系统与功率管理系统(PMS)的接口有以下功能:推进启动请求与启动允许信号;向PMS提供推进运行信号及推进电机转速和功率信号(4~20 mA) ;接收PMS发出的全功率允许信号及减载运行指令.
推进遥控系统的供电为交流(AC)220 V电源(主电源)和直流(DC)24 V电源(备用电源)两路,分别接入左,右推进遥控系统各自的中心控制箱,通过中心控制箱内向各分系统配电.左,右推进遥控系统中心控制箱内都设有独立的不间断电源(UPS).
按规范要求该船应配置PMS.PMS 根据负载的实时功率需求和电网的运行状况对每台柴油发电机组进行监控并协调各台柴油发电机组的工作,动态调整对机组的控制指令,对供电分系统进行故障报警和处理,为电力推进系统及其他用电设备提供可靠,稳定及优化配置的电力能源.在供电分系统出现故障时,PMS能采取相应的措施,尽可能保证对负载的连续供电,避免电站断电,以确保船舶的安全性[3].
该船因发电机数量少且主要航行工况下两台主发电机均投入运行,没有通常自动电站系统的常备机组,故而备用机组的起动和解列在此并不重要.PMS的重点在于可靠的功率分配,既要保证电站安全又要保证航行安全,要能对全船主要用电负载进行实时跟踪,准确计算当前实际用电量与电站能够提供的电能间的差距,根据运行趋势或局部故障等原因及时发出减载或限载的指令.事实上电站管理系统最有效的控制对象是推进系统,管理好推进的功率分配就能大幅度地调节电站所需总功率.然而对推进系统既存在用电安全又存在航行安全的问题.该船的"越控"线路接到变频系统,虽能处理变频装置及推进电机故障范围内的越控问题,但作为PMS如何全面来进行越控管理尚有待改进.
与PMS有信号接口的设备和系统,包括推进控制系统,艏侧推驱动系统,全回转起重机,主配电板,综合监测报警系统和液压泵站控制系统.
起重船的电力推进设计具有某些特点,虽然并不追求先进指标,但有关的基本要求还是要认真对待的.介绍了设计中遇到的主要问题;有些问题有待于今后在实船使用中进一步总结,如该船推进电机正倒车时间(现按15 s考虑)也需通过实船的验证和考核.推进系统采用虚拟24脉冲整流对抑制谐波的效果和PMS的有效功能与可靠性等也需在实践中总结.
The authors have declared that no competing interests exist.
| [1] |
钢质海船入级规范(第5分册) [S]. |
| [2] |
电力推进船舶谐波问题及实例分析 [J]. |
| [3] |
功率管理技术在舰船电力推进中的应用 [J]. |

/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}