摘要:
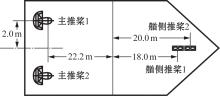
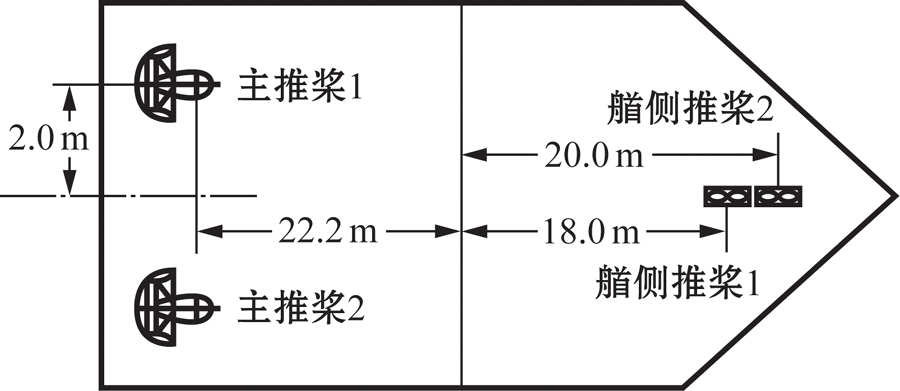
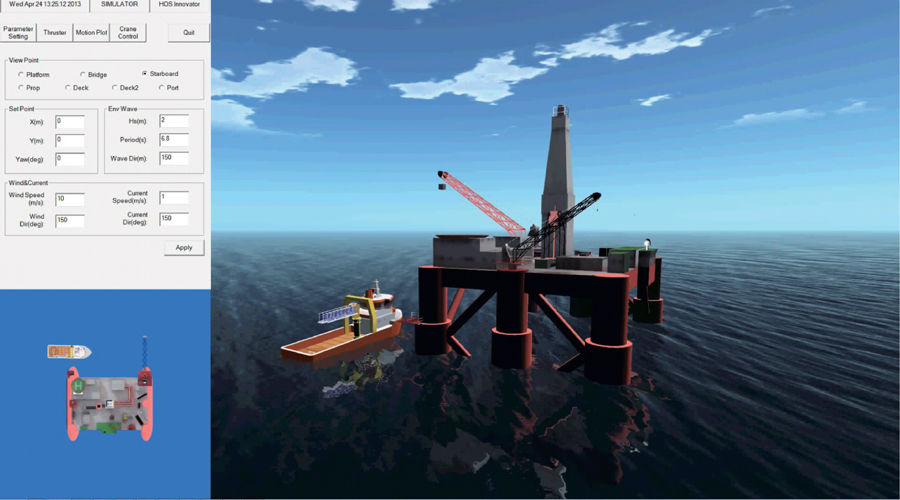
在Matlab/Simulink环境下建立了海洋工程船操作过程的时域模拟平台,以并发的方式与可视化模块集成,可以实现海上作业的虚拟操作.通过对案例船"润江1"舷桥布放过程的操作模拟,获得了定点作业状态下的完整时历数据,对于海洋工程船的安全性评估和过程优化具有重要意义.
中图分类号:
门金龙, 许劲松, 施浩, 侯佐新. 海洋工程船的时域操作模拟[J]. 海洋工程装备与技术, 2014, 1(2): 140-145.
Jin-long MEN, Jin-song XU, Hao SHI, Zuo-xin HOU. Time-Domain Simulation of OSV Operation[J]. Ocean Engineering Equipment and Technology, 2014, 1(2): 140-145.