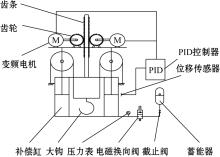
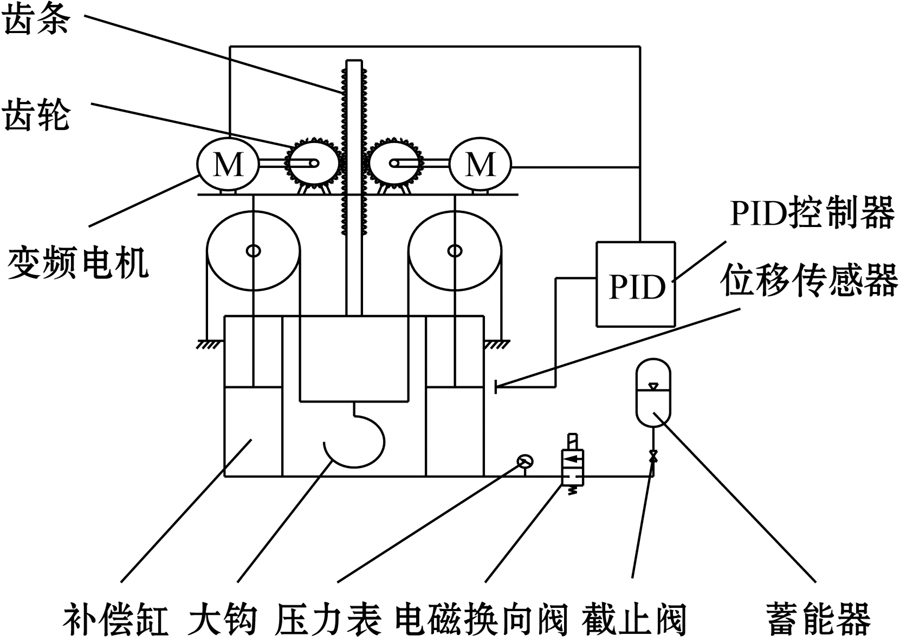
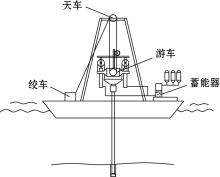
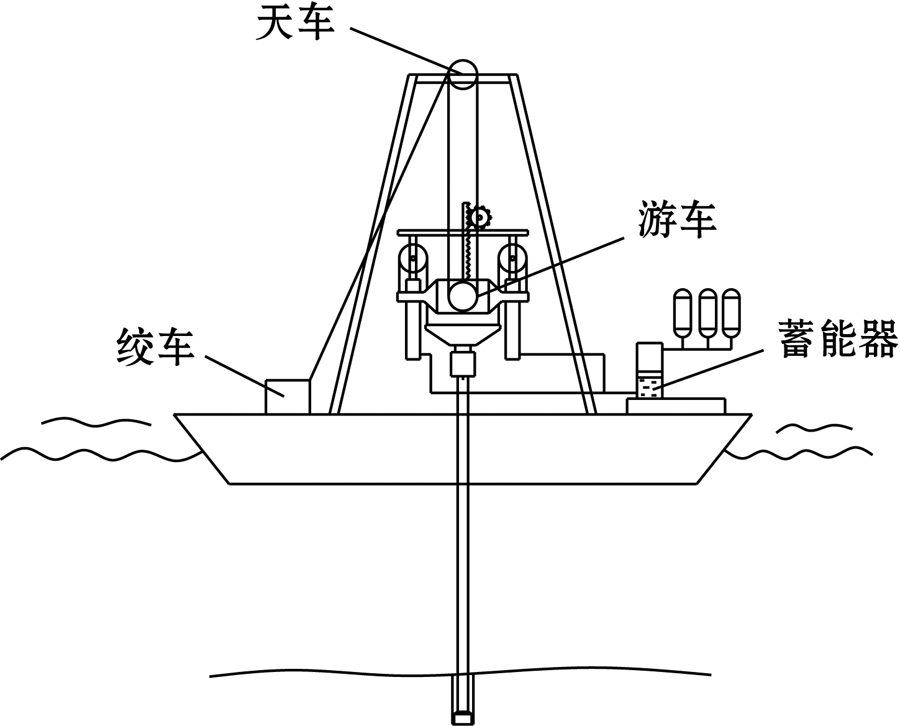
New Heave Compensation System Design of Swim Car Hook and Motion Analysis
Qing-you LIU1, Yang TANG2, Chong-jun HUANG3, Wei LI2
1. State Key Laboratory of Oil and Gas Geology and Exploration, Southwest Petroleum University, Chengdu, Sichuan 610500, China 2. School of Mechanical and Electrical Engineering, Southwest Petroleum University, Chengdu, Sichuan 610500, China 3. Drilling & Production Engineering Research Institute of Chuanqing Drilling Engineering Co., Ltd., CNPC, Guanghan, Sichuan 618300, China
Qing-you LIU, Yang TANG, Chong-jun HUANG, Wei LI. New Heave Compensation System Design of Swim Car Hook and Motion Analysis[J]. Ocean Engineering Equipment and Technology, 2014, 1(1): 70-75.